Hi,
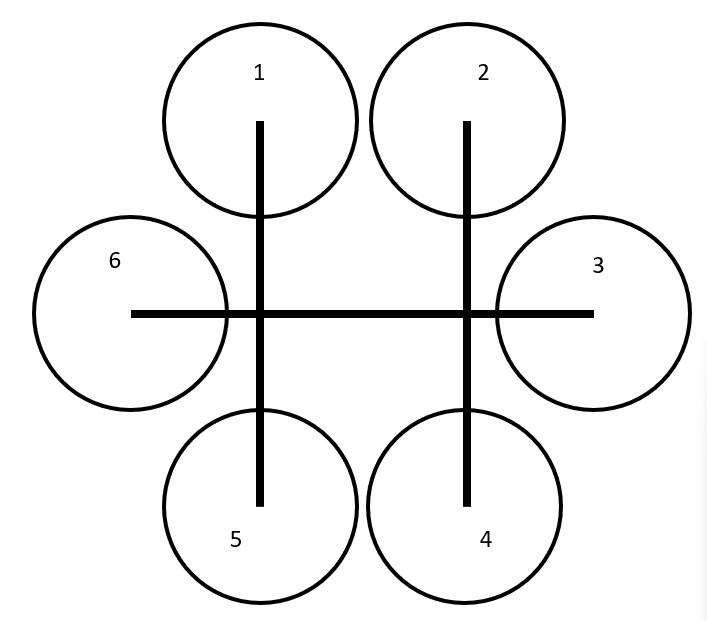
I am working on a project of a hexacopter configuration with the 2 lateral motors being tilted in pitch (same servo for both motors) and roll (different servos for each one). The following picture I think could help to understand the configuration.
This tube that supports motors 3 and 6 rotates for pitch control (-30 to 30º) and the motors 3 and 6 rotates outwards (0 to 30º) to push the drone to the right and left, respectively.
This configuration is required by the concept of operation of this UAV.
Trying to configure the pixhawk I have, I found that tilt is only for pitch, yaw or both, it don’t allow me to configure a tilt servo to control the roll. Is that right or I’m missing something? If anyone could help me with this tilt roll configuration.
yes, it is only possible to control pitch and yaw with tilt. If you want to control roll also, you have to modify the code.
Do you have any clue of where I have to do it? Which file or directory I should code this?
As already exists this functions for pitch and yaw, I think I can learn how to do it faster studying this features codes. Can you help me with this information?
Hey Marcelo, did you ever figure it out?
I never figured out how to edit the code. My solution was to set up a second flight mode on the RC, with the servos passing through the Pixhawk without interference. It worked in some tests without taking off, but I still don’t know if it will work when flying. My drone crashed shortly after takeoff on the first flight, but without using this tilt mode. There was a problem with incorrect PID tuning in normal mode, with the Pixhawk in position flight mode.
I tried another solution using this repository, but I couldn’t get it to work properly:
Tilting multicopters feature by salvamarce · Pull Request #21476 · PX4/PX4-Autopilot (github.com)
Hey Marcelo I was able to change the code to actually affect yaw and roll for my application if you’re still interested
Definitely I am. Did you test it in flight?
Yeah I did not too long ago. Needs some tuning but not bad. There’s a thread on discord if you look for bicopter.
Dear GoldenGoose,
I stopped working in this project since last year and I’m coming back now with it. Have you made any updates? I don’t have a Discord account, do you know if I can see the thread without be in the community?
Hey Marcelo,
I think discord will be easier. I think it’s worthwhile making an account. There’s a lot of good stuff on the px4 server.
Hey GoldenGoose,
do you have a hint for me what and where you changed to allow affect roll? Thanks, Tobias
Since it’s been a while I don’t actually remember what I changed. It was very minor If I recall correctly, literally changed one value and added Roll and Yaw in the option menu.
@GoldenGoose Thanks a lot! This looks like a nice bird. Congrats. I did a bicopter like this with ardupilot, some code hacking. Now I try it with PX4. Ardupilot was easier 
Great! Thank you a lot.
Nice copter you have done!