I’m working on adding a sonar sensor to my iris, and I need sonar topics and msg.
i fixed the plugin in sonar model but i got nothing from that fix. I need your help
<sensor name="sonar" type="sonar">
<pose>0 0 0 0 1.57 0</pose>
<sonar>
<min>0.02</min>
<max>5.0</max>
<radius>1.33974388395</radius>
</sonar>
<plugin name="SonarPlugin" filename="libgazebo_sonar_plugin.so">
<robotNamespace></robotNamespace>
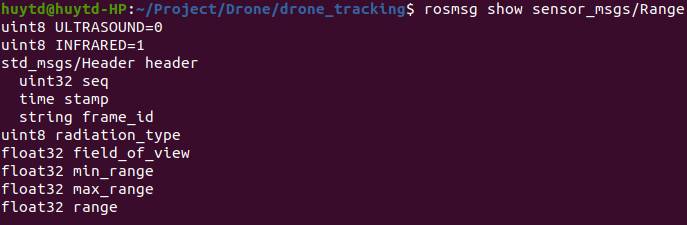
<output_type>sensor_msgs/Range</output_type>
<topicName>sensor/sonar</topicName>
<radiation_type>ULTRASOUND</radiation_type>
</plugin>
<always_on>1</always_on>
<update_rate>20</update_rate>
<visualize>true</visualize>
</sensor>
huytd@huytd-HP:~/Project/Drone/drone_tracking$ rostopic list
/aruco_marker_img
/aruco_marker_pos
/clock
/diagnostics
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/performance_metrics
/gazebo/set_link_state
/gazebo/set_model_state
/iris_fpv_cam/usb_cam/camera_info
/iris_fpv_cam/usb_cam/image_raw
/iris_fpv_cam/usb_cam/image_raw/compressed
/iris_fpv_cam/usb_cam/image_raw/compressed/parameter_descriptions
/iris_fpv_cam/usb_cam/image_raw/compressed/parameter_updates
/iris_fpv_cam/usb_cam/image_raw/compressedDepth
/iris_fpv_cam/usb_cam/image_raw/compressedDepth/parameter_descriptions
/iris_fpv_cam/usb_cam/image_raw/compressedDepth/parameter_updates
/iris_fpv_cam/usb_cam/image_raw/theora
/iris_fpv_cam/usb_cam/image_raw/theora/parameter_descriptions
/iris_fpv_cam/usb_cam/image_raw/theora/parameter_updates
/iris_fpv_cam/usb_cam/parameter_descriptions
/iris_fpv_cam/usb_cam/parameter_updates
/mavlink/from
/mavlink/gcs_ip
/mavlink/to
/mavros/actuator_control
/mavros/adsb/send
/mavros/adsb/vehicle
/mavros/altitude
/mavros/battery
/mavros/battery2
/mavros/cam_imu_sync/cam_imu_stamp
/mavros/camera/image_captured
/mavros/companion_process/status
/mavros/debug_value/debug
/mavros/debug_value/debug_vector
/mavros/debug_value/named_value_float
/mavros/debug_value/named_value_int
/mavros/debug_value/send
/mavros/esc_info
/mavros/esc_status
/mavros/esc_telemetry
/mavros/estimator_status
/mavros/extended_state
/mavros/fake_gps/mocap/tf
/mavros/geofence/waypoints
/mavros/global_position/compass_hdg
/mavros/global_position/global
/mavros/global_position/gp_lp_offset
/mavros/global_position/gp_origin
/mavros/global_position/home
/mavros/global_position/local
/mavros/global_position/raw/fix
/mavros/global_position/raw/gps_vel
/mavros/global_position/raw/satellites
/mavros/global_position/rel_alt
/mavros/global_position/set_gp_origin
/mavros/gps_input/gps_input
/mavros/gps_rtk/rtk_baseline
/mavros/gps_rtk/send_rtcm
/mavros/gpsstatus/gps1/raw
/mavros/gpsstatus/gps1/rtk
/mavros/gpsstatus/gps2/raw
/mavros/gpsstatus/gps2/rtk
/mavros/hil/actuator_controls
/mavros/hil/controls
/mavros/hil/gps
/mavros/hil/imu_ned
/mavros/hil/optical_flow
/mavros/hil/rc_inputs
/mavros/hil/state
/mavros/home_position/home
/mavros/home_position/set
/mavros/imu/data
/mavros/imu/data_raw
/mavros/imu/diff_pressure
/mavros/imu/mag
/mavros/imu/static_pressure
/mavros/imu/temperature_baro
/mavros/imu/temperature_imu
/mavros/landing_target/lt_marker
/mavros/landing_target/pose
/mavros/landing_target/pose_in
/mavros/local_position/accel
/mavros/local_position/odom
/mavros/local_position/pose
/mavros/local_position/pose_cov
/mavros/local_position/velocity_body
/mavros/local_position/velocity_body_cov
/mavros/local_position/velocity_local
/mavros/log_transfer/raw/log_data
/mavros/log_transfer/raw/log_entry
/mavros/mag_calibration/report
/mavros/mag_calibration/status
/mavros/manual_control/control
/mavros/manual_control/send
/mavros/mission/reached
/mavros/mission/waypoints
/mavros/mocap/pose
/mavros/mount_control/command
/mavros/mount_control/orientation
/mavros/mount_control/status
/mavros/nav_controller_output
/mavros/obstacle/send
/mavros/odometry/in
/mavros/odometry/out
/mavros/onboard_computer/status
/mavros/param/param_value
/mavros/play_tune
/mavros/px4flow/ground_distance
/mavros/px4flow/raw/optical_flow_rad
/mavros/px4flow/raw/send
/mavros/px4flow/temperature
/mavros/radio_status
/mavros/rallypoint/waypoints
/mavros/rc/in
/mavros/rc/out
/mavros/rc/override
/mavros/setpoint_accel/accel
/mavros/setpoint_attitude/cmd_vel
/mavros/setpoint_attitude/thrust
/mavros/setpoint_position/global
/mavros/setpoint_position/global_to_local
/mavros/setpoint_position/local
/mavros/setpoint_raw/attitude
/mavros/setpoint_raw/global
/mavros/setpoint_raw/local
/mavros/setpoint_raw/target_attitude
/mavros/setpoint_raw/target_global
/mavros/setpoint_raw/target_local
/mavros/setpoint_trajectory/desired
/mavros/setpoint_trajectory/local
/mavros/setpoint_velocity/cmd_vel
/mavros/setpoint_velocity/cmd_vel_unstamped
/mavros/state
/mavros/statustext/recv
/mavros/statustext/send
/mavros/target_actuator_control
/mavros/terrain/report
/mavros/time_reference
/mavros/timesync_status
/mavros/trajectory/desired
/mavros/trajectory/generated
/mavros/trajectory/path
/mavros/tunnel/in
/mavros/tunnel/out
/mavros/vfr_hud
/mavros/vision_pose/pose
/mavros/vision_pose/pose_cov
/mavros/vision_speed/speed_twist_cov
/mavros/wind_estimation
/pid
/pid_error
/rosout
/rosout_agg
/tf
/tf_static