/* Calculate desired total thrust amount in body z direction. /
/ To compensate for excess thrust during attitude tracking errors we
* project the desired thrust force vector F onto the real vehicle’s thrust axis in NED:
* body thrust axis [0,0,-1]’ rotated by R is: R*[0,0,-1]’ = -R_z */
matrix::Vector3f R_z(_R(0, 2), _R(1, 2), _R(2, 2));
the code is in “src/modules/mc_pos_control”,For the above code,I think the component of gravity is getting bigger,as the picture.
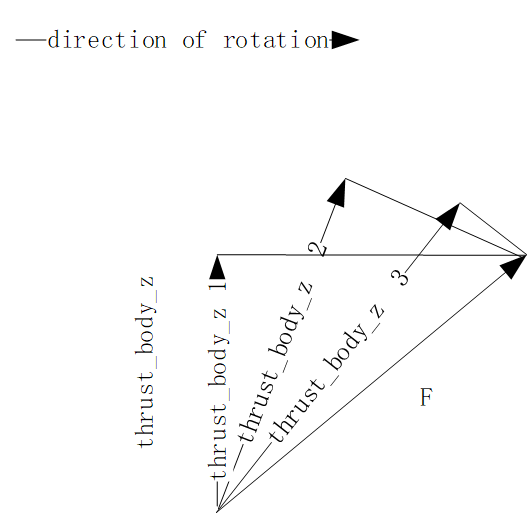
why? Did I misunderstand?