I am working on a vehicle on which I have installed a servo parachute. It is a spring parachute driven by a single servo that I have connected to the PWM_MAIN_5 output.
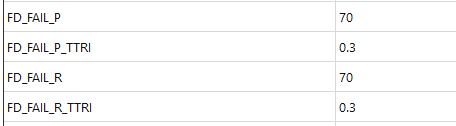
I have enabled the flight termination with the parameter CBRK_FLIGHTTERM=0 and configured the attitude trigger parameters (FD_FAIL_P, FD_FAIL_R, etc).
And finally I have also defined the failsafe values for the different PWM outputs, in this case the most important one is the parachute output PWM_MAIN_FAIL5 = 1900.
![]()
I have also tested that the servo works and moves correctly from the QGC actuators tab.
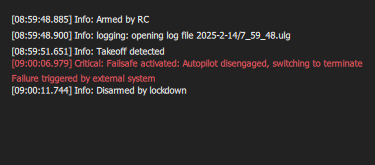
The problem comes when I try to check the automatic trigger, which does not work.
To test the automatic triggering I arm the drone without propellers, give it gas and lift it off the ground so that it goes from “takeoff” to “flying” (since if the failure detector trips during takeoff it only disarms the drone and therefore does not trigger the parachute).
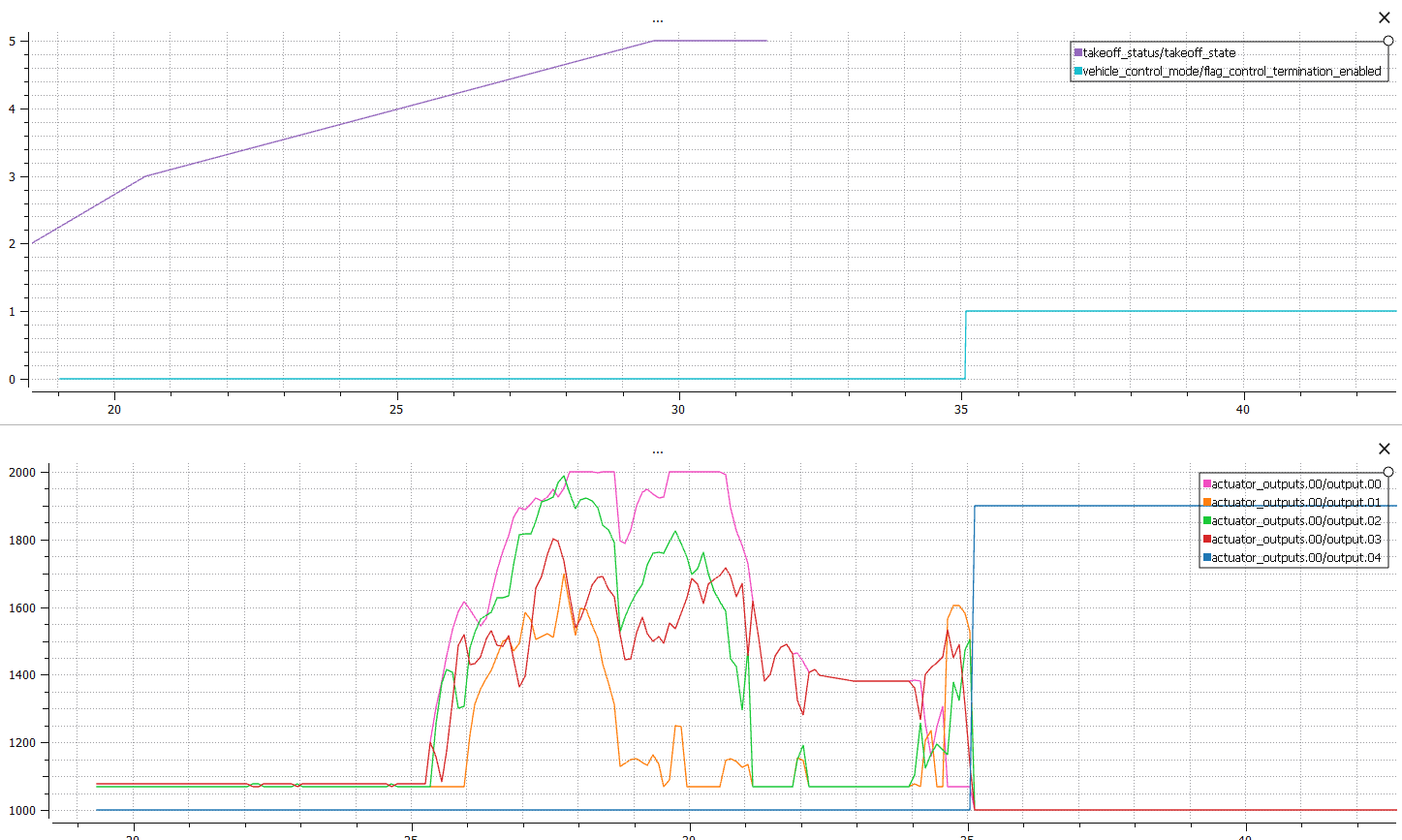
Then I rotate the drone to more degrees than the ones configured in FD_FAIL_P/R. The failure detector goes off but it does NOT switch the PWM outputs to their failsafe values, it switches them to the disarmed values.
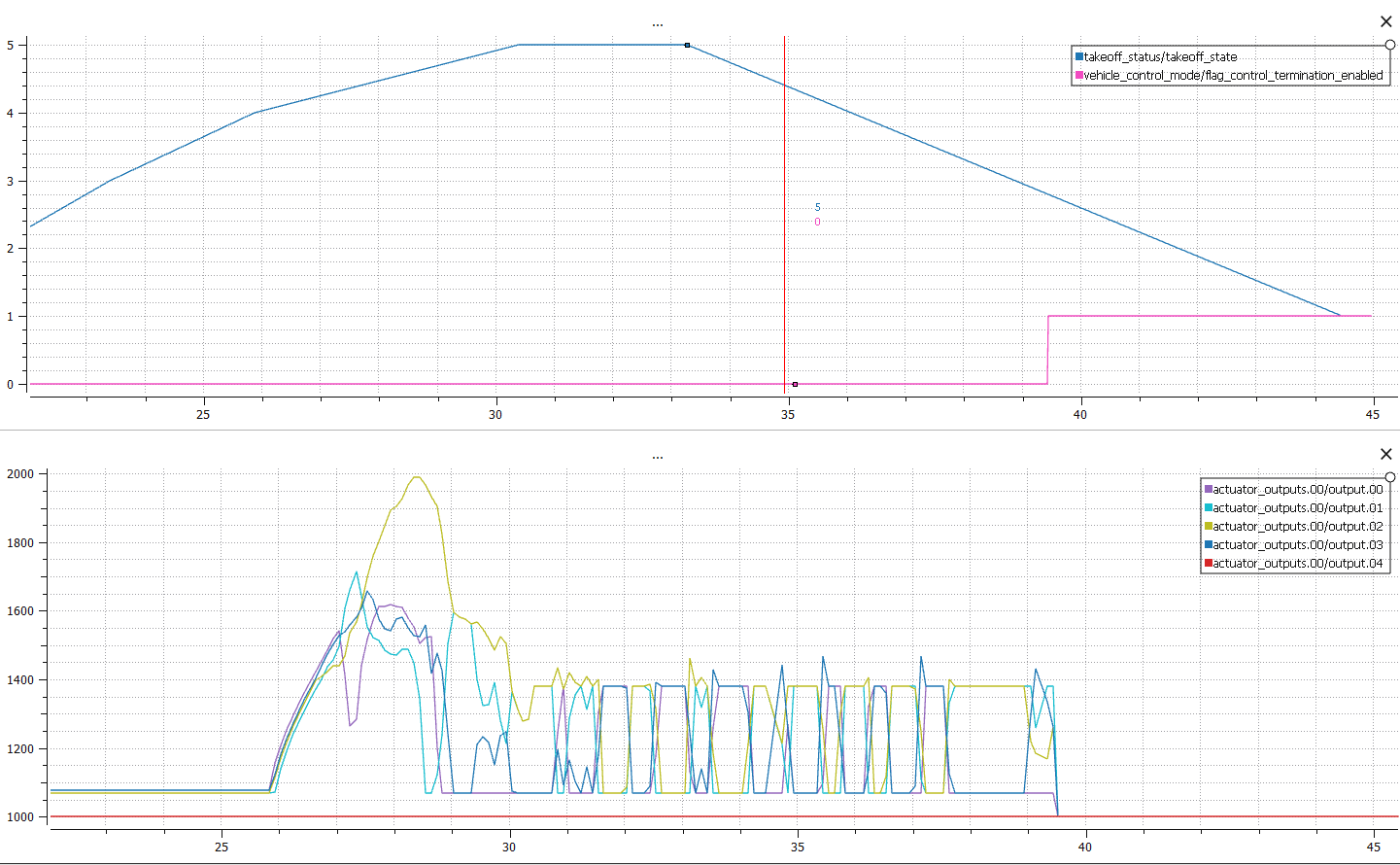
I have done multiple tests and so far I have not been able to get the configured failsafe values to be written to the PWM outputs after a flight termination.
And given the results I am getting, I do not feel safe to test it in flight.
I would appreciate it if someone could help me.
I attach a log here: https://review.px4.io/plot_app?log=a3a29e40-cfa7-4d05-9b18-099b34fdf0b8