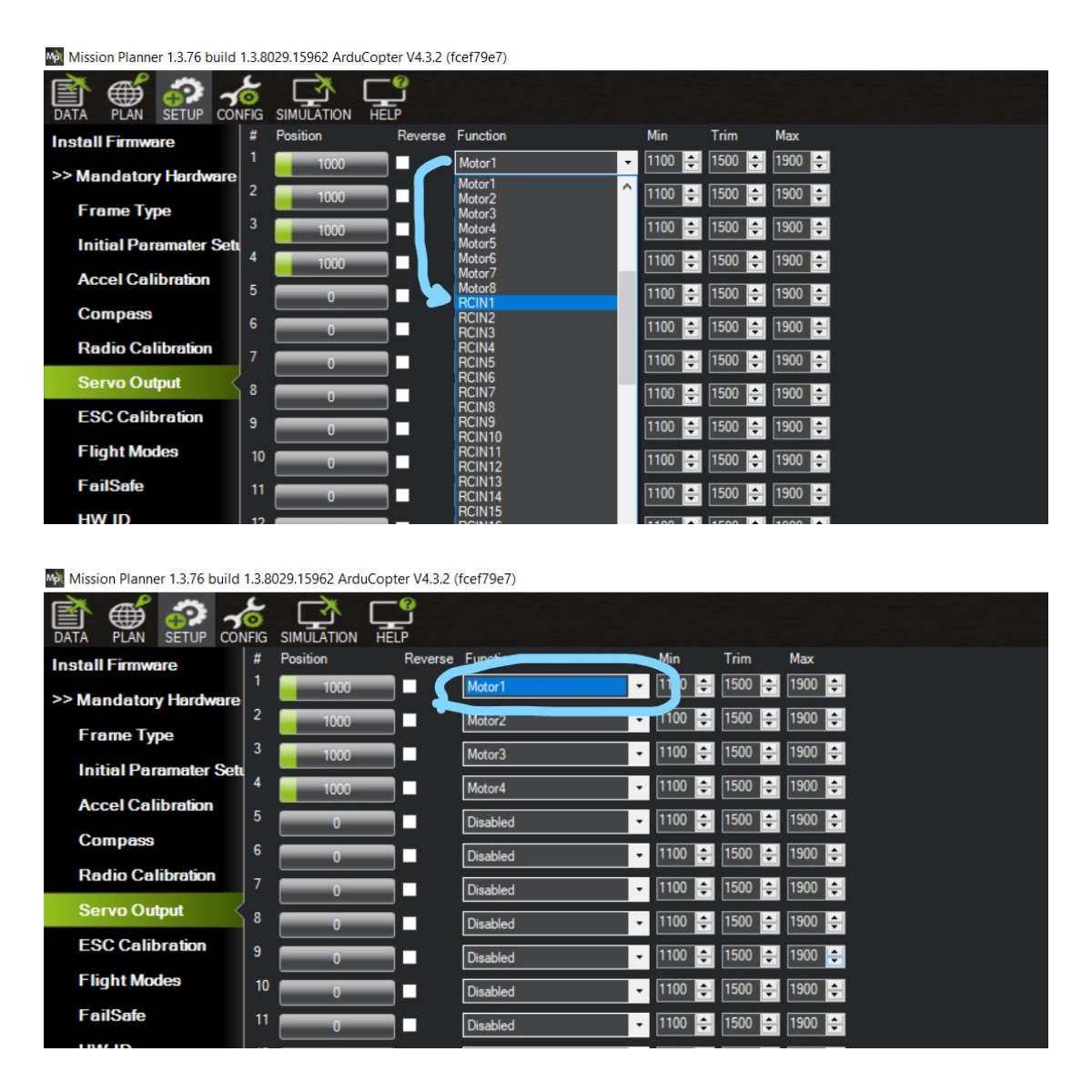
Have a nice day. I want to change the servo output while the drone is flying as in this photo. But I want to change it during flight. How can I do it?