Hi
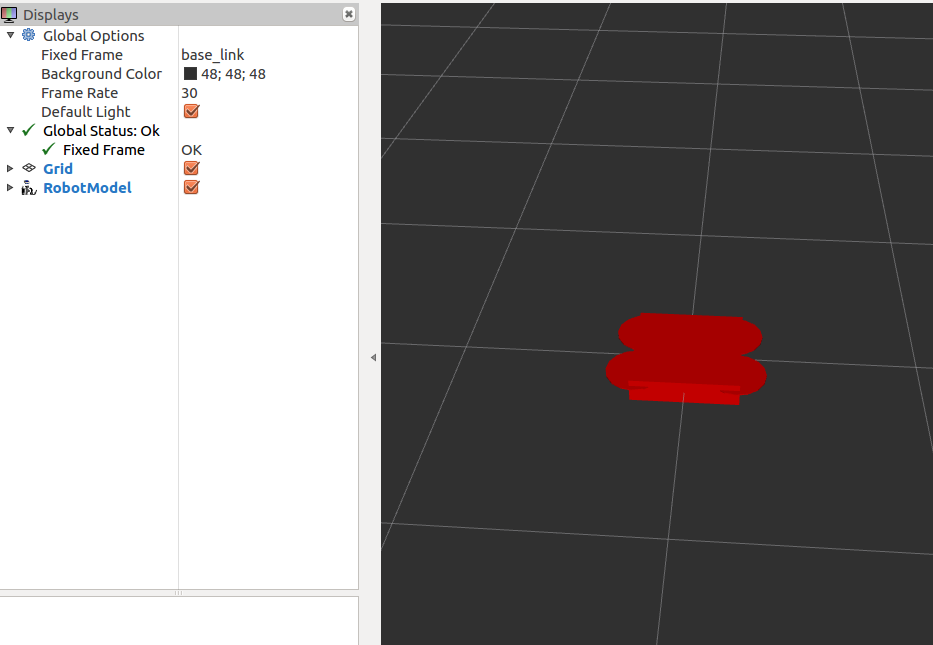
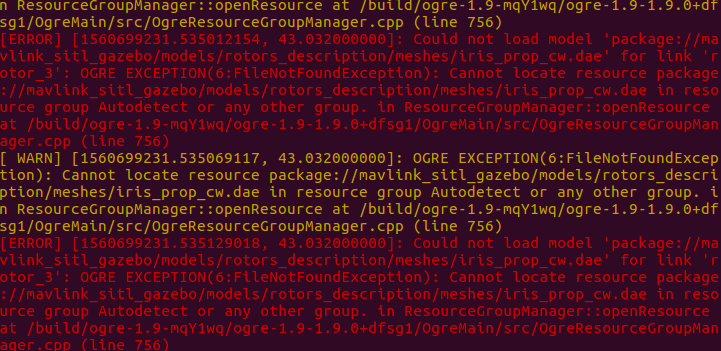
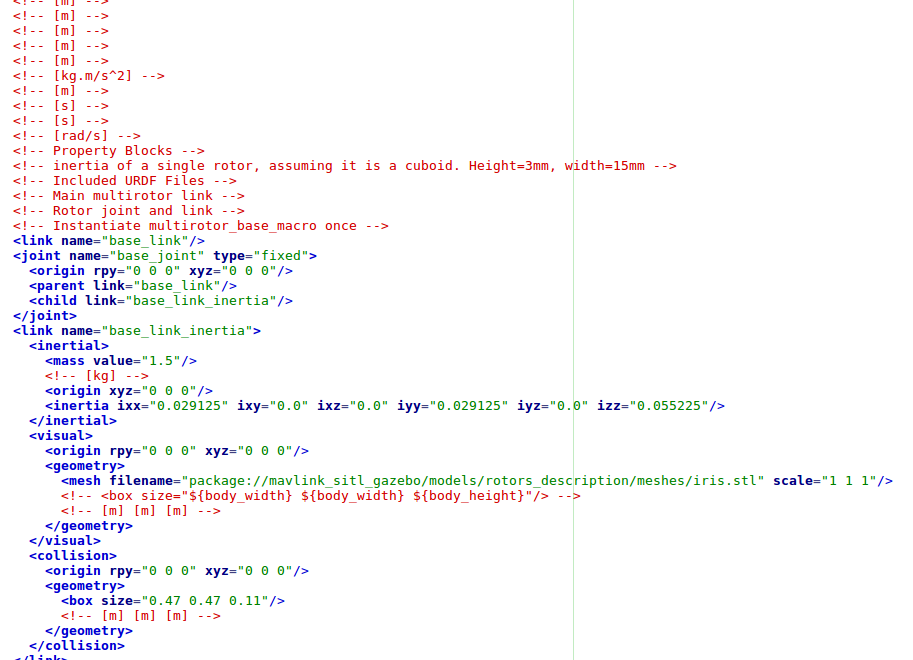
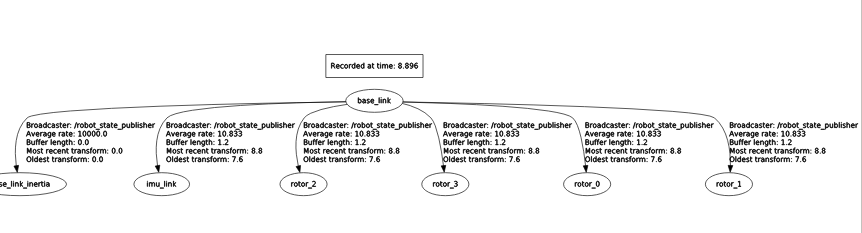
The RVIZ is not available of load the meshes from the iris model. I created a iris base urdf.file from the xacro using xacro.py and created the robot publisher and joint state.
Any idea?