Hello!
I’m trying to implement the ros2_px4_teleop_example by ARK Electronics. I’m using px4 v1.15.4.
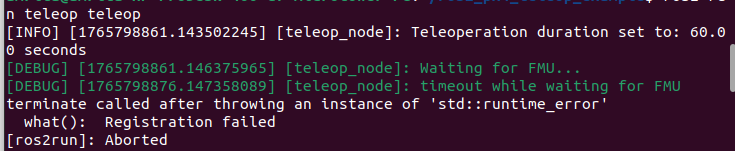
The Micro XRCE Agent is connecting, but when i do run the code - ros2 run teleop teleop, it shows, waiting for FMU and then it aborts.
This is what the output shows