PX4 Sync / Q&A - 2025-09-03T15:00:00Z
Agenda
- Announcements
- Future Events
- Flight Testing Update
- Release Discussion
- Bug Report / Q&A
Announcements
![]() The PX4 DevSummit you all were waiting for
The PX4 DevSummit you all were waiting for
- CFPs are closed!!! Reviews in progress!!!
- Early Bird Tickets are still around, so use your chance to get them!!!
Future Events
ROSCon 2025 Singapore
Next Dronecode Meetup
Upcoming meetup in Korea
https://elisa.tech/event/elisa-project-dronecode-foundation-meetup/
Flight Testing Update
About the Test Team
The team at Ascend Engineering (Chicago). are running flight testing for the community.
How to reach out to the team
- GitHub: Tag user @PX4**/testflights**
- Discord: #flight-testing
- Weekly on the PX4 Dev Call
How to Request Testing (GitHub)
- Write down the steps to test your issue/pull request
- Make sure to note the risk involved in flying
- Write down things to look out for / anticipate - eg: “we are looking for no yaw jumps”
- Add issue/pull request to the Flight Testing project board
- Make sure to specify any hardware/software requirements as much as possible
Resources:
Discussion
- Testing team is reviewing their flight logs on v1.16 for debugging possibility of issues.
Release Discussion / Updates
We are going to be promoting the release branch to stable, and push a stable release ASAP.
v1.16 Release Discussion
![]() New Release
New Release
Release notes here as well → Releases · PX4/PX4-Autopilot · GitHub
Project Board
Community Q&A / PRs for Review
PRs:
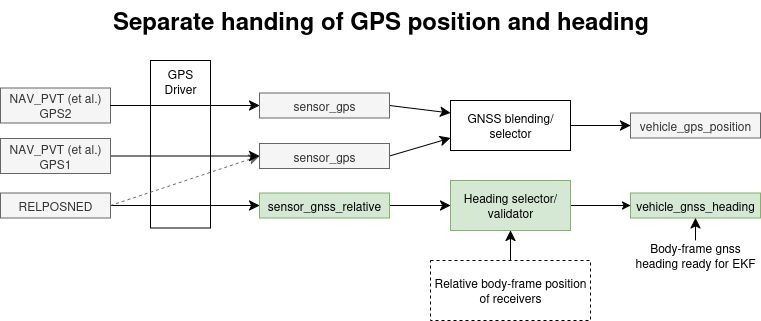
- Concept: Separate GNSS position and heading topics by oystub · Pull Request #25516 · PX4/PX4-Autopilot · GitHub
- https://github.com/PX4/PX4-Autopilot/pull/25012
Issues:
- FLASH savings feature tracker · Issue #25491 · PX4/PX4-Autopilot · GitHub
- [Bug] Takeoff/Land without GPS does not hold position · Issue #22250 · PX4/PX4-Autopilot · GitHub (tests in SITL to reproduce)
→ We might need to update SITL tests to be based on new Gazebo