Hi all,
I did a simple test on the performance test of the local planner.
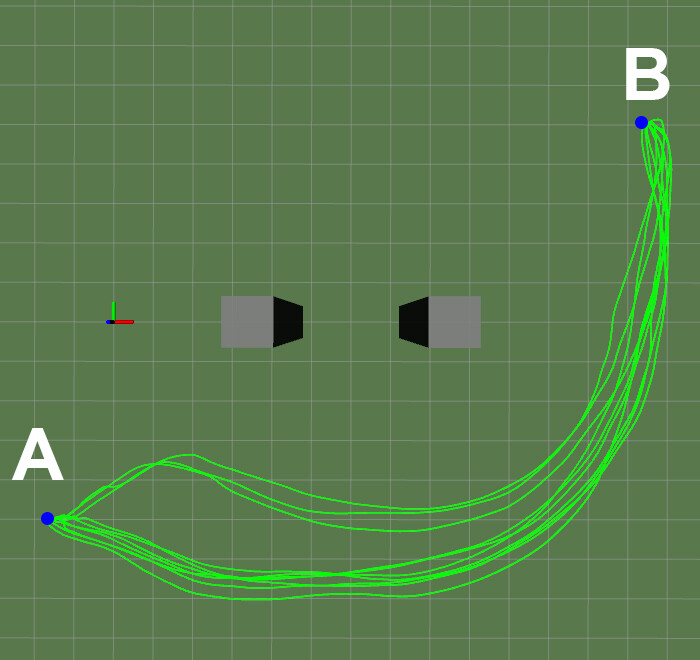
As you can see in the screenshot, I did a simple test from point A to point B 10 times from scratch.
Is local_planner tree generation stochastic?
If not, why the tree generation varies from time to time.
Thanks in advance for your answers.
@hdmd88
Are you using offboard mode for A,B waypoint ?