Today I installed an ESP8266 on my pixhawk flight controller with the PX4 flight stack.
My goal is to control the Pixhawk via. ROS but when i try to arm or to change the position it needs sometimes 10 seconds or more before the copter reacts.
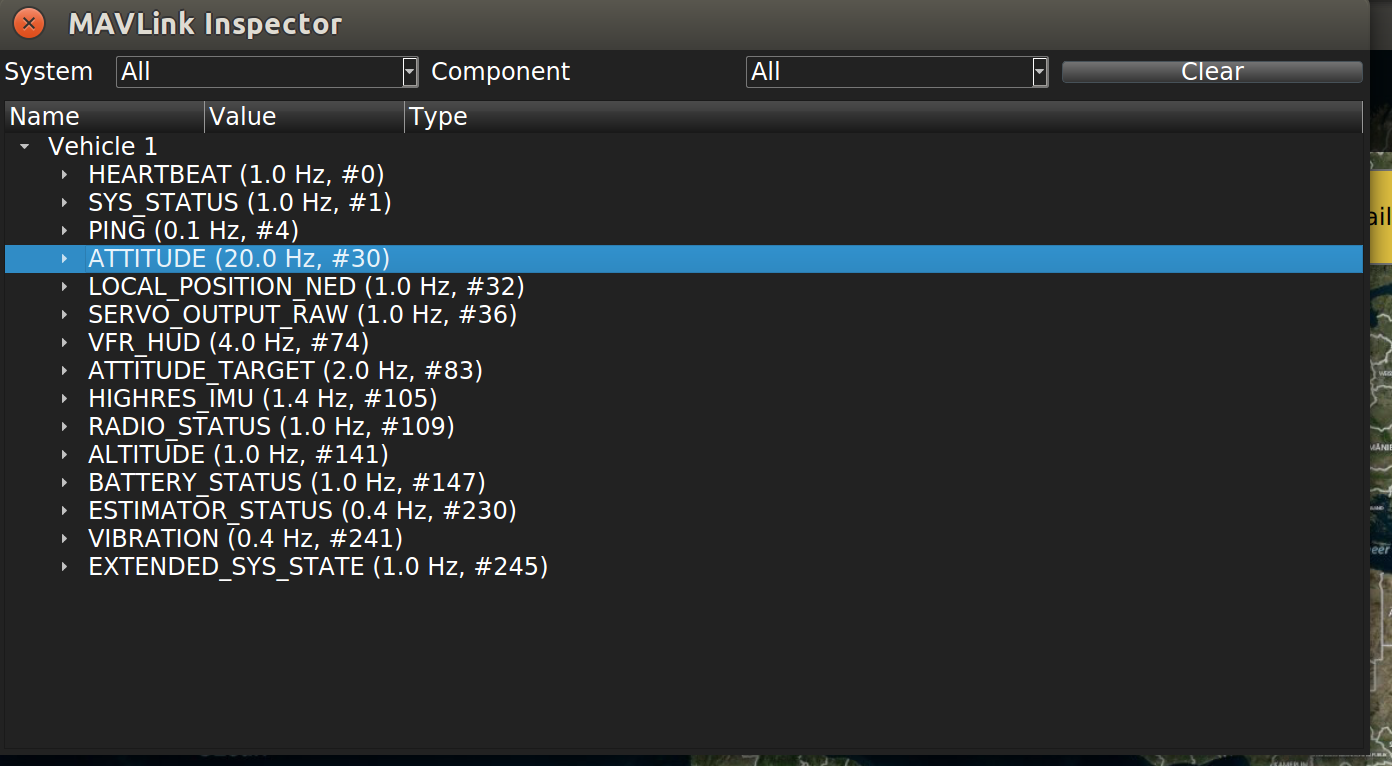
I think it has sth. to do with low publishing rates I found on the MAVlink Inspector.
Is it possible to set those rates higher?
@Michi14clp It is possible to set the rates higher, but I doubt that changing the rates will solve your problem
How are you arming the copter? If you are using the example code in the offboard tutorial it is not strange that it takes about ten seconds to turn the quad into offboard and arm the quad
mh… my user interface calls the service each time when the arming button has been pressed. Shouldn’t it be sufficient?
At the simulation it works perfectly but the real PixHawk has problems with that.
@Michi14clp You can change the rates by modifying the [mavlink_main.cpp] (https://github.com/PX4/Firmware/blob/master/src/modules/mavlink/mavlink_main.cpp)
As you can see in the offboard code, it waits for 5 seconds after it resends the service call.
if( current_state.mode != "OFFBOARD" && (ros::Time::now() - last_request > ros::Duration(5.0)))
You can reduce the wait time or modify that part of the code to make the copter enter offboard mode and arm faster