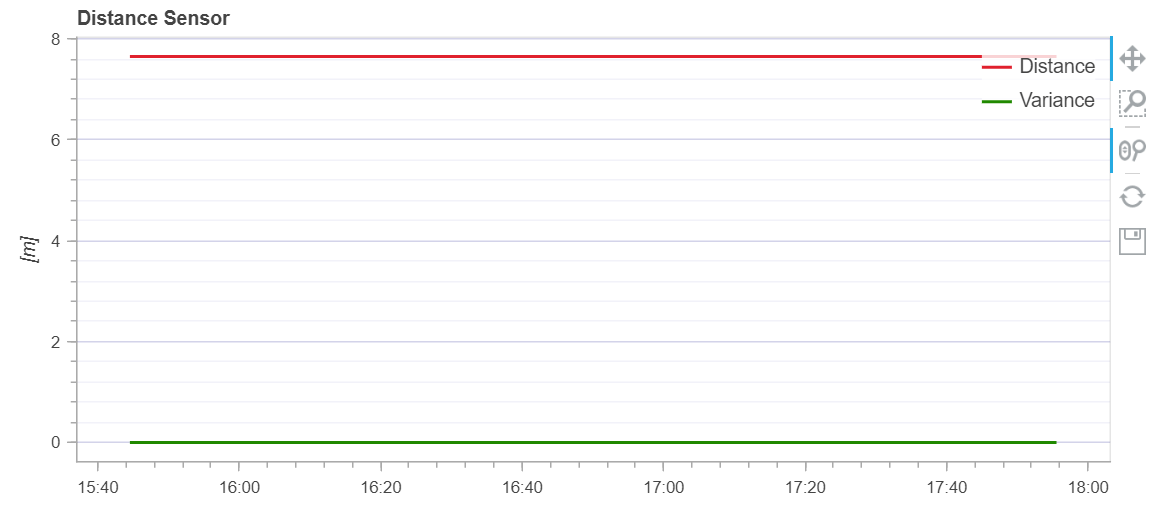
Currently, I’m using the collision prevention in PX4 1.13.3 with mRo PixRacer Pro. But some wired flight behavior occurred. The distance sensor didn’t detect anythings and we just push fully on my RC and let the drone fly forward. However, the drone just move and stop alternatively. I have checked the log files, the x direction velocity is actually intermittently instead of smoothly forward.
The sensor you are using its a little bit out of date… its an analog sensor.
Better you look for a different one… like Lightware lidars or teraranger.
Aside the log better also see a video about the drone behavior during the detection.
Usually that sonar was used as landing sensor and not for object detection.