Hi,
I bought a Pixhawk clone called pixhawk 2.4.8 and I don’t have the right baro inside ! I have MS5607 instead of MS5611.
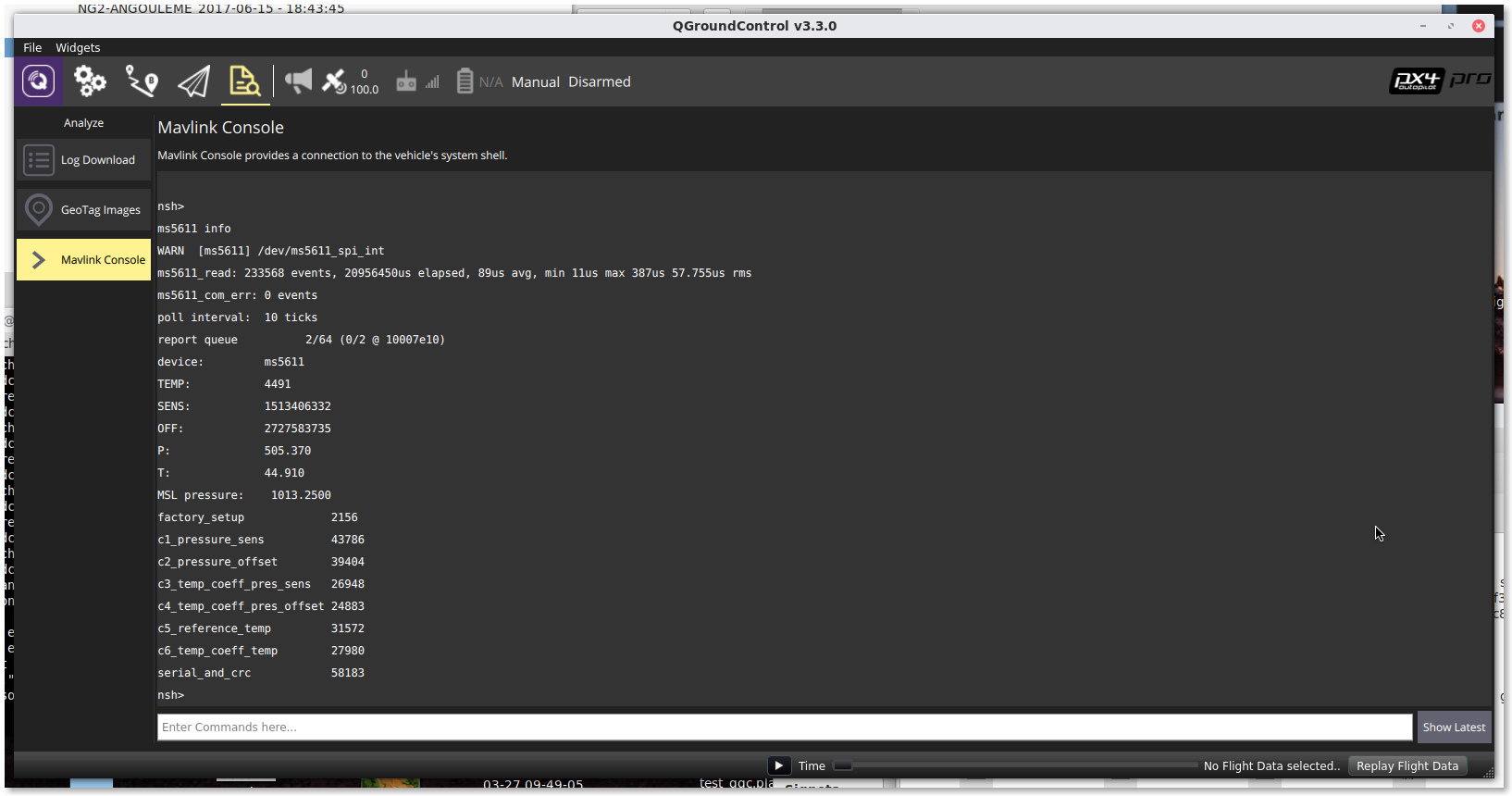
It’s well know on rcgroups, selling by chinese reseller. I want to know if it will work with px4 firmware. I installed px4, open mavlink console and type : ms5611 info command which return the following pressure : 505.370. Of course wrong ! How coul I manage it, I know there is some supported frame like bebop which use ms5607. Should I have to build firmware myself ?
Sincerely,
Sylvain
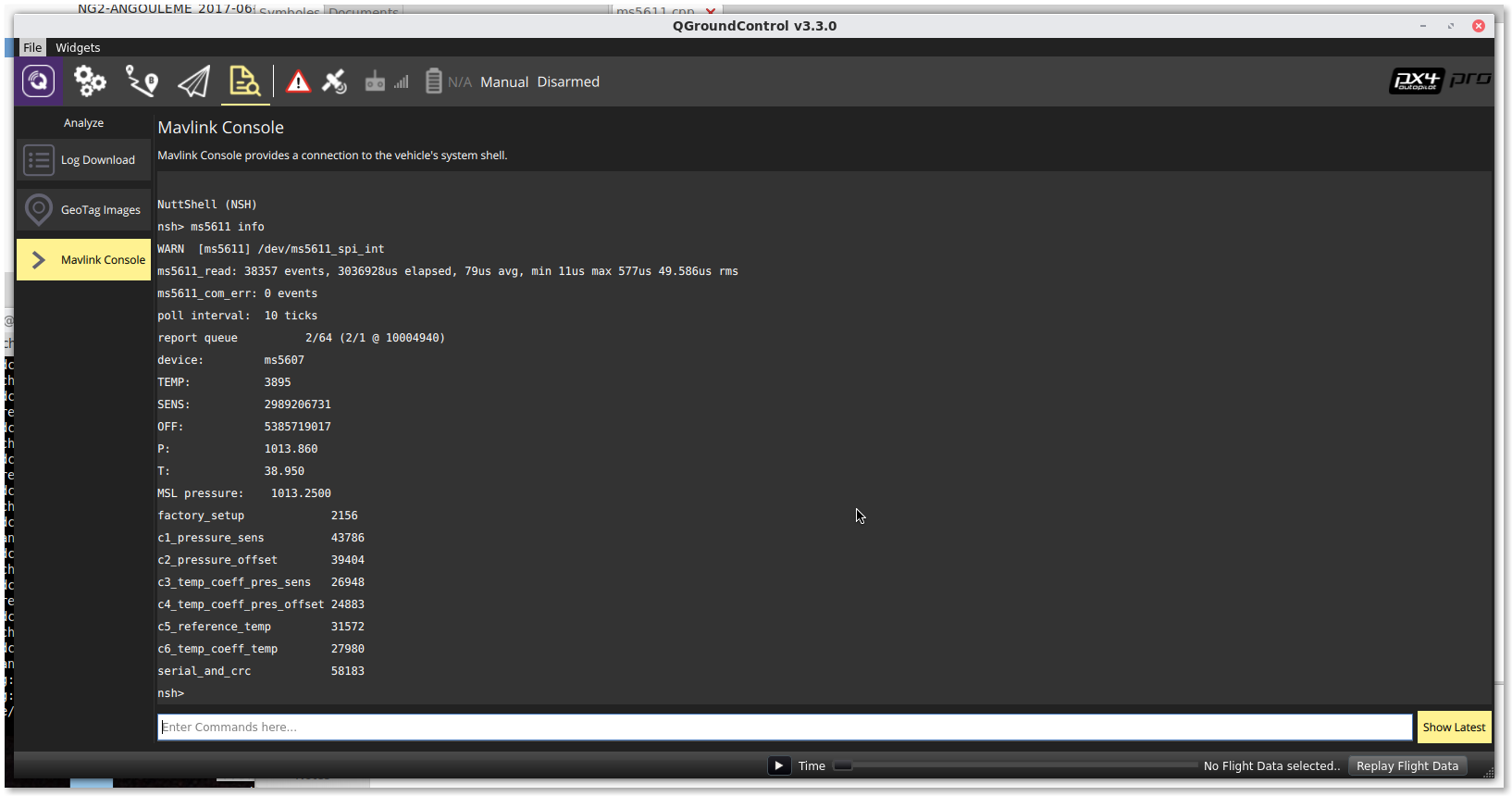
Solved with beta version :
Surely related to this in ms5611.cpp :
if (autodetect) {
if (_device_type == MS5611_DEVICE) {
if (brp.pressure < 520.0f) {
/* This is likely not this device, try again */
_device_type = MS5607_DEVICE;
_measure_phase = 0;
continue;
}
} else if (_device_type == MS5607_DEVICE) {
if (brp.pressure < 520.0f) {
/* Both devices returned a very low pressure;
* have fun on Everest using MS5611 */
_device_type = MS5611_DEVICE;
}
Was like this before :
if (autodetect) {
if (_device_type == MS5611_DEVICE) {
if (brp.altitude > 5300.f) {
/* This is likely not this device, try again */
_device_type = MS5607_DEVICE;
_measure_phase = 0;
continue;
}
} else if (_device_type == MS5607_DEVICE) {
if (brp.altitude > 5300.f) {
/* Both devices returned very high altitude;
* have fun on Everest using MS5611 */
_device_type = MS5611_DEVICE;
Time to test now, thank you PX4 dev