Hi all,
I’m currently developing a project for my Master degree and I wanted a clarification on this topic.
I’m currently spawning multiple models in a Gazebo simulation using this command:
(since it’s in a launch file in Python, all the curly brackets values are substituted at runtime). In particular, as you can see I do set an initial pose to spawn the model at.
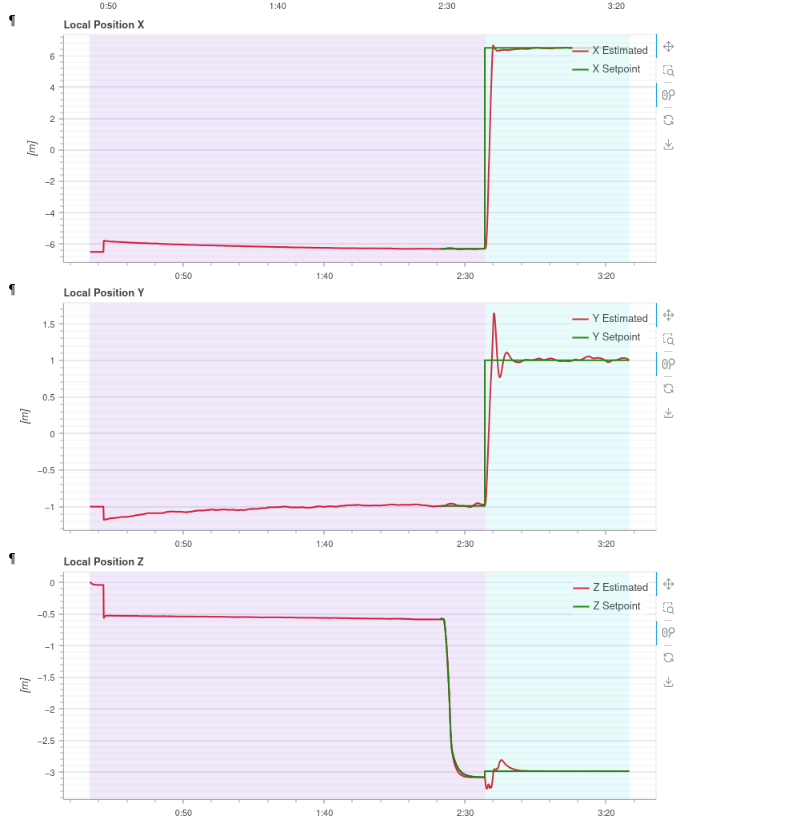
I would have expected that the EKF2 origin/init would have been in the spawning position, but instead it seems to be in (0,0,0). I see this both from the ROS2 logs printing the VehicleLocalPosition topic messages and from the relative log I’ve uploaded here:
Hi,
I have kind of the same setup. The output of VehicleLocalPosition has values relative to the spawn location, as it would be expected.
In the Gazebo GUI, the robots are at the spot that you provided in PX4_GZ_MODEL_POSE ?
The only difference I see between our two lines is that I completely define PX4_GZ_MODEL_POSE : PX4_GZ_POSE=x,y,z,0,0,0,0 (last 4 values represent the quaternion of the desired orientation).
Can you confirm you are using the default parameters of the EKF2 ?