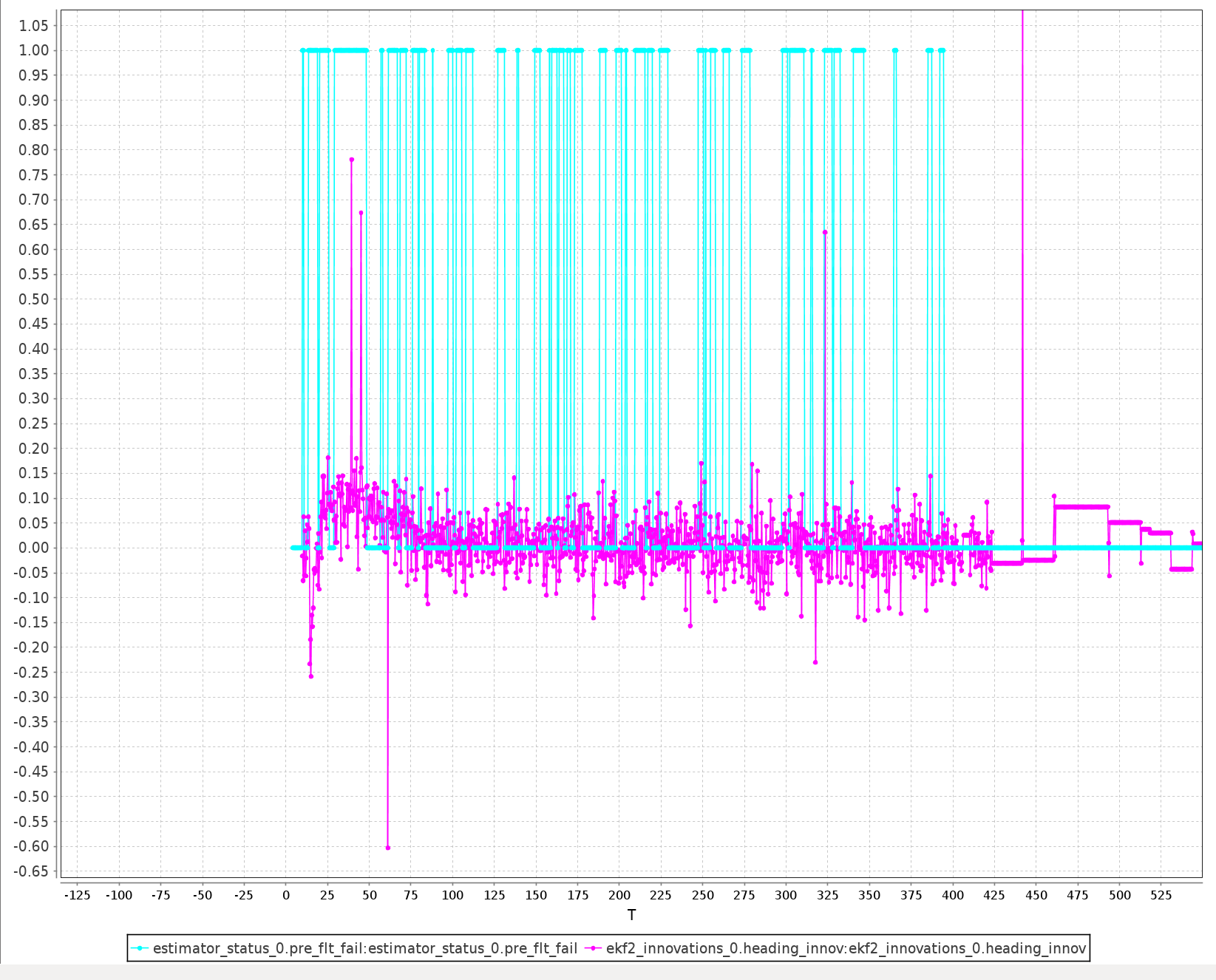
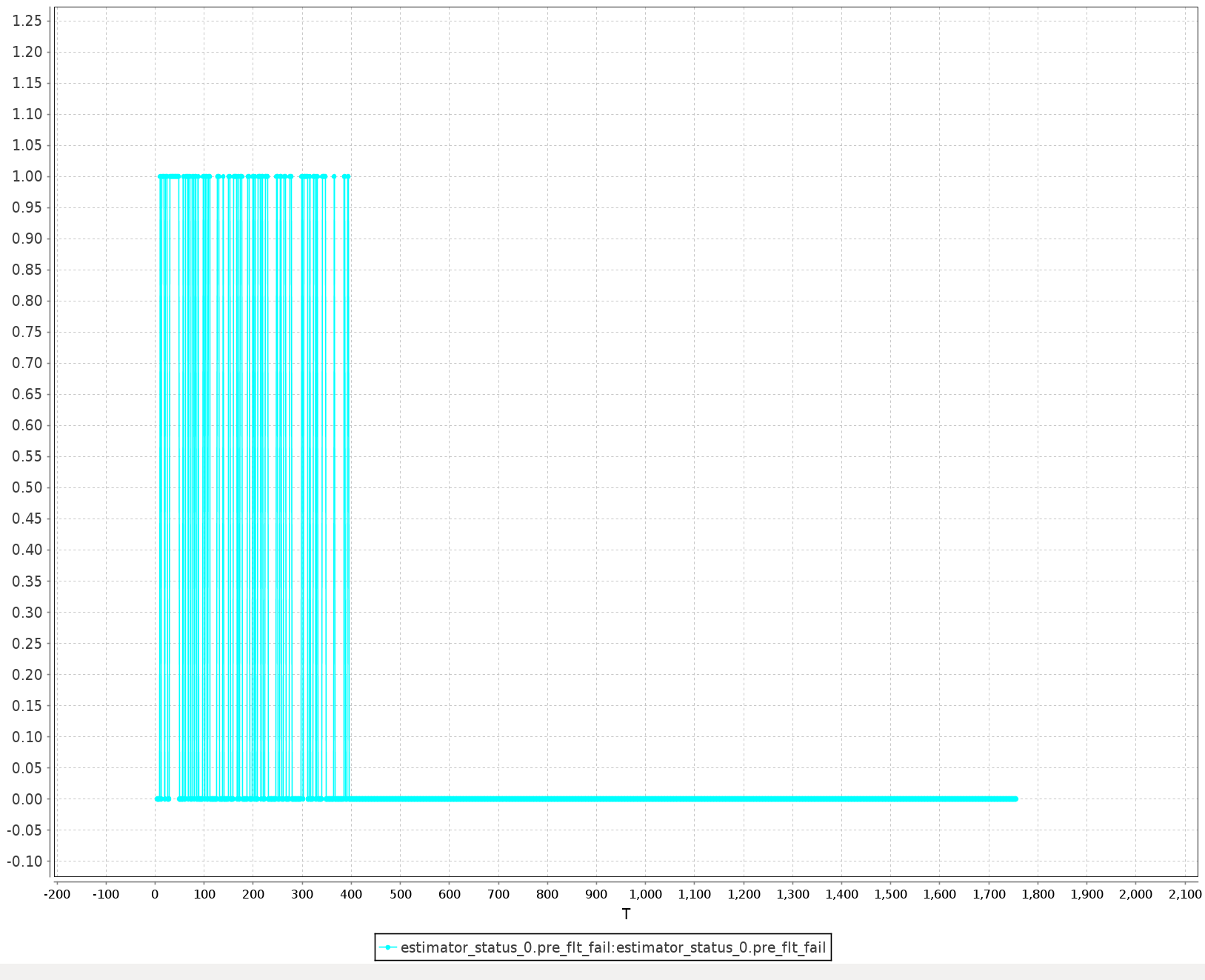
@Jeremy_Zanzig Yes, I had some time to look at it. The ekf reports a pre-flight fail at the beginning of your log (pre_flt_fail flag in estimator_status message)
The conditions for that flag to trigger can be found here
You can basically see that this can happen if the estimator innovations are too large. We check innovations for velocity, position, height and heading. In your case it looks like it might the heading innovation that triggers these failure.
I can see some spikes in the heading innovation when the vehicle is on the ground, probably you should check out your compass data.