Hello everyone. My name is Joonmo, and I have questions.I have been following ROS 2 User Guide (PX4-ROS 2 Bridge) from px4 document for Gazebo simulation.
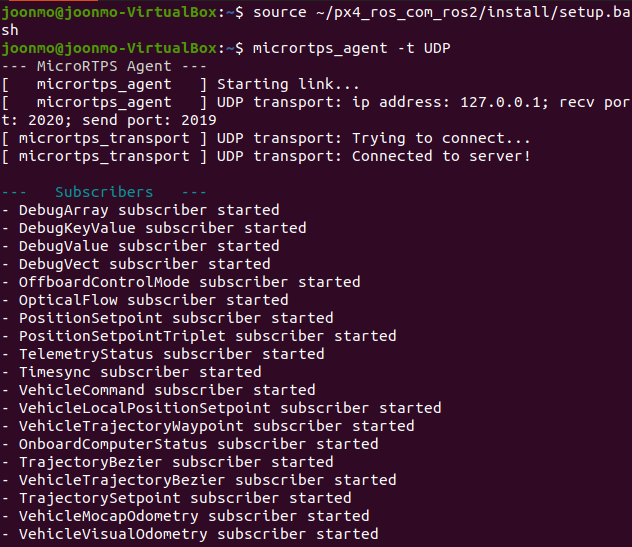
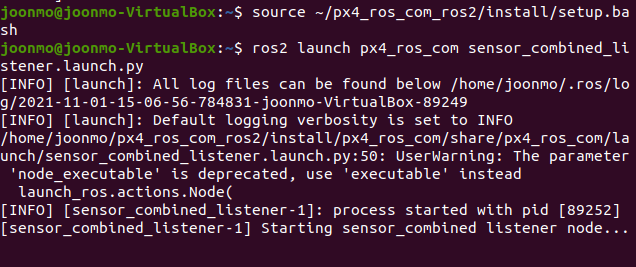
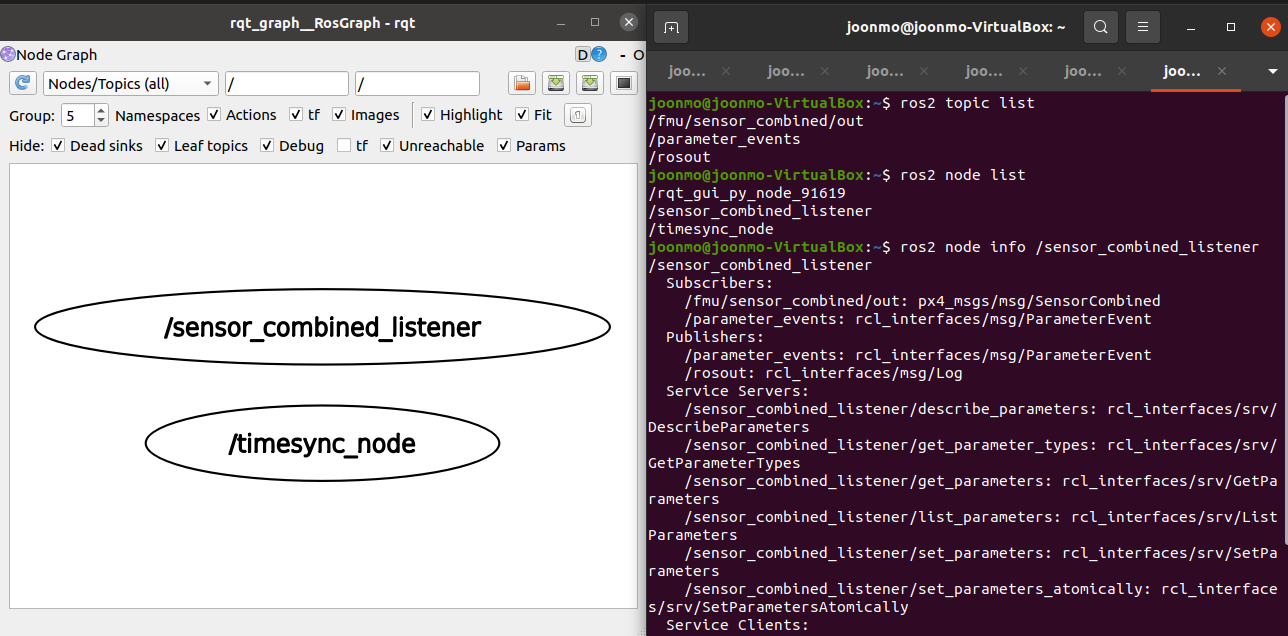
I am facing the issue that " ros2 launch px4_ros_com sensor_combined_listener.launch.py " is not giving output. I think micrortps_agent is not publishing information to topic.
Do you guy have any idea to fix this?
Which repo or code should I look at?
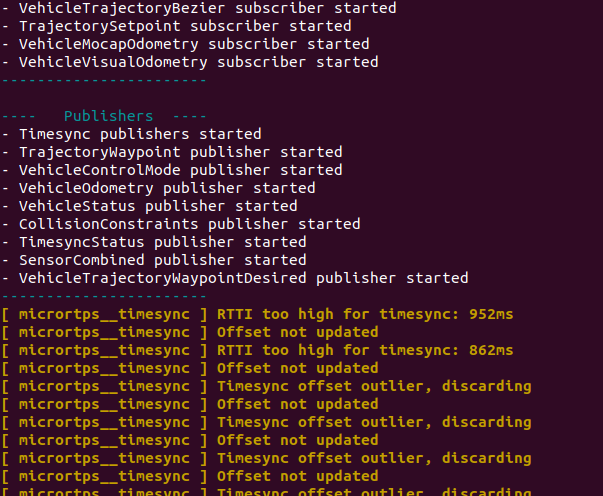
I also ran “micrortps_agent -v -t UDP”, and output was something with “RTTI too high and offset not updated.” what does this mean?
I’m having the same issue. I noticed this post is from a while ago, have you figured out what the issue is? I’ve got the same output as you do in each window and from ros2 topic list and ros2 node list. Running Ubuntu 22.04 and ROS2 Humble.
I had the same issue. I siwthched PX4 version to v13.3, running Ubuntu 22.04, ROS2 humble. After reboot, this issue was disappeared and the sensor_combined_listener.launch.py had ouputs.