I wanted to simulate multi-uav (standard_vtol model) in HITL.
Step 1. Modify in single_vehicle model.

Step 2. Modify multi vehicle model.

I have changed the launch file to simulate the model. To work step by step, at first i simulated 10 standard_vtol model in SITL mode and it worked well.
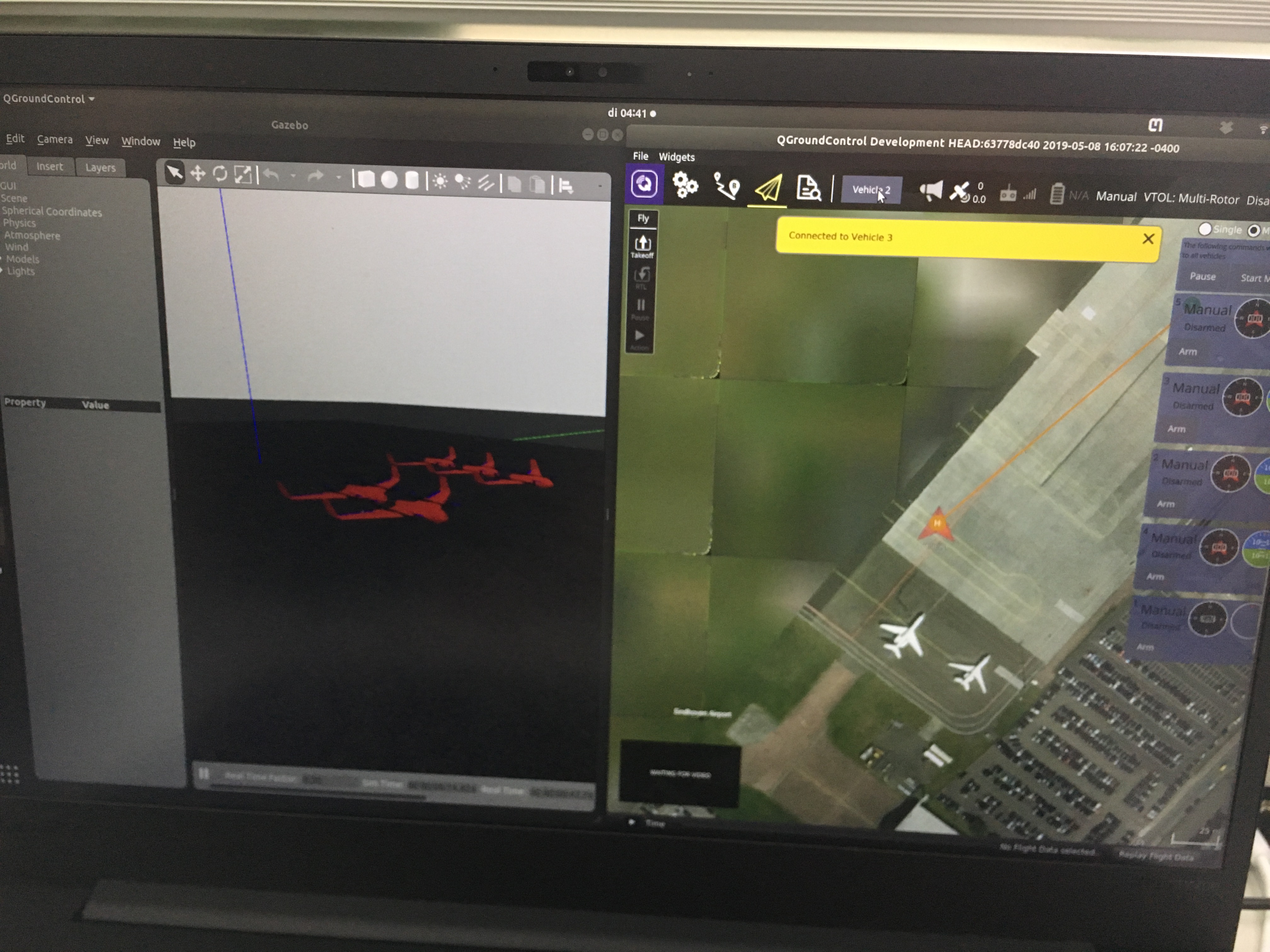
Step for HITL mode (5 Vehicles):
![IMG_2024|666x500]
(upload://y1zv4GSFdFcJl7eP3edzcyrmeEQ.jpeg)
I had followed all steps mentioned on the website. Next, I connected pixhawk board uploaded with firmware (make px4_fmu-v3_default upload) and then connected 5 of them through USB hub.
I configured the QGC for hitl (HIL standard_vtol) model. I followed all the step on the website and used following commands.
(1). DONT_RUN=1 make px4_sitl gazebo_standard_vtol
(2). source Tools/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
(3). export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd):$(pwd)/Tools/sitl_gazebo
(4). roslaunch px4 multi_uav_mavros_vtol_sitl_sdf.launch
Gazebo launches 5 vehicles.
Issues:
Issues:
(1). QGC showing connection to all model but GPS position for only Vehicle 1 and not for rest four.
(2). The model with position on QGC is in manual flight mode and not starting the mission.
My Assunption:
I thought, It is communicating to vehicle through dev/ttyACMO,
so I added four more in QGC ttyACM1 to ttyACM4 and in model file
/dev/ttyACM0
/dev/ttyACM1
/dev/ttyACM2
/dev/ttyACM3
/dev/ttyACM4
and again followed the procedures mentioned above.
It still did not work.
QUESTION:
What can I modify in the codes to run multiple standard_vtol model in Hardware-in-the-Loop simlation.?
 .
.