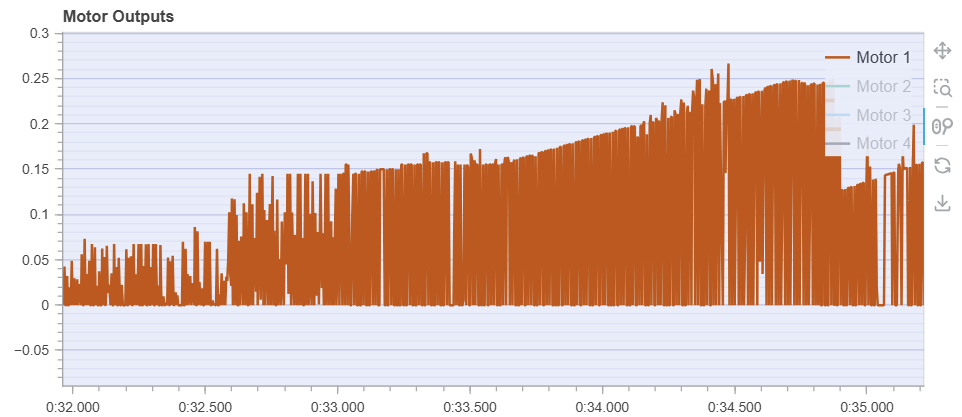
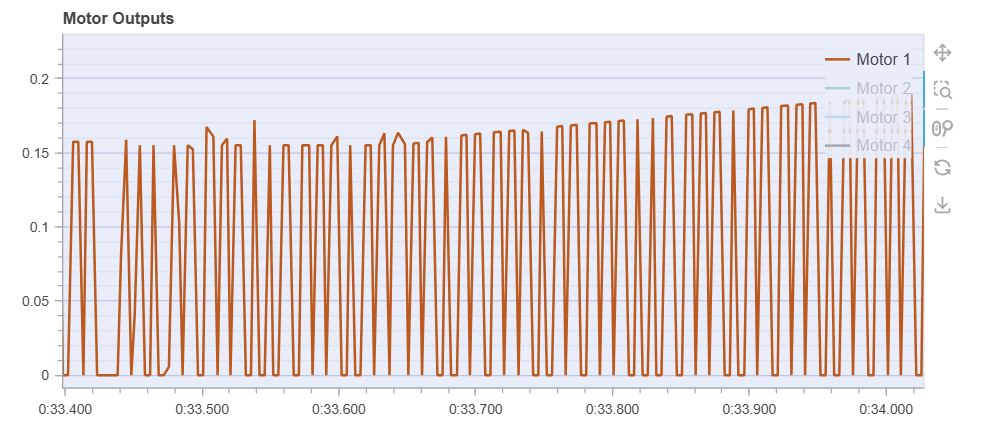
I have a Cube Pilot Orange+ running PX4 v.1.15.1 and have experienced some issues with the motor output oscillating between a reasonable value and 0.
It is a small 250 frame and the cube is attached to small dampeners. I have tried multiple things to resolve this so my question is simply if any one ever experienced this and what could be the issue?
I have tried multiple types of settings, different firmware versions, different dampeners, different PIDs, different filters (cutoff frequencies), different props, diffrent communication methods to the ESC etc. The results are always the same even though different versions of it.
So instead of discussing the specifics of the rig and testing any new other thing I am looking for what could be the root cause of such oscillations.
- Can a bad ESC-communication/connection cause this? Have tried oneshot and PWM400 and different firmware and versions on the ESC and also different units of the ESC (SpeedyBee BLS 60A 4-1 ESC).
- Can bad electrical behaviour case this? Could connections and drops in power supply cause such an issue? Could that cause the OUTPUT to look like this?
- Can a too responsive PID cause this?
- Could this be due to the Cube Orange+ dampening?
- Any other interesting way that this can occur?
I have also tried several different Cube units and reflashed multiple times ![]()