hello,
I want to build an indoor drone using UWB. Currently, I use uoploop’s UWB system, and I have successfully driven it on px41.9.2,The UWB system coordinate system of nooploop is ENU. I exchange the XY axis and reverse the Z-axis, transfer it to the ned coordinate system, and publish the output data to the vehicle_visual_odometry msg.
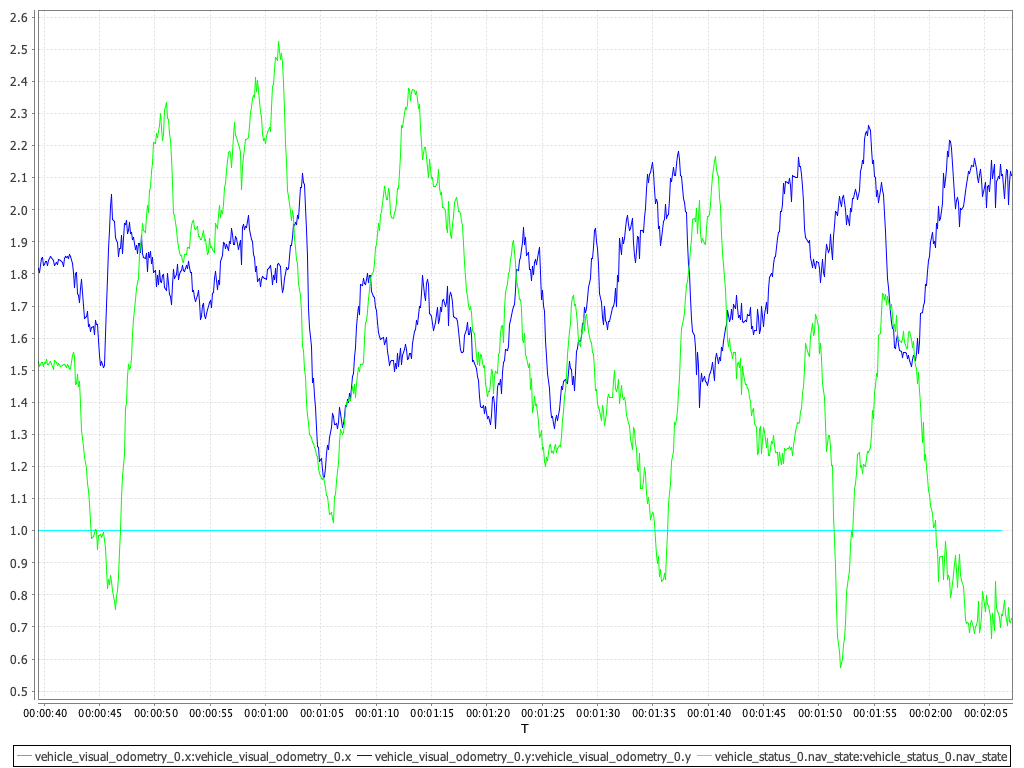
This is the raw data of UWB.
I use ekf2 estimator and set the following parameters。
EKF2_AID_MASK 8(vision position fusion)。But the effect of fusion is very poor, and it is easy to diverge. I tried to adjust the parameters(
EKF2_EV_DELAY EKF2_EVP_NOISE), but I didn’t get good results.This is the complete log. I fly in Fixed Altitude mode and check the local position fusion effect. uwb fusion
ulog in google drive
Are there places I didn’t notice? How to improve my work?
thanks!