Good day
I was running my own custom flight task the other day, when I saw this weird behavior from my drone. The drone would be in hover mode (Be aware that this is a custom hover mode that is running in the flight task) but would bob up-and-down.
Below is the local z position log.
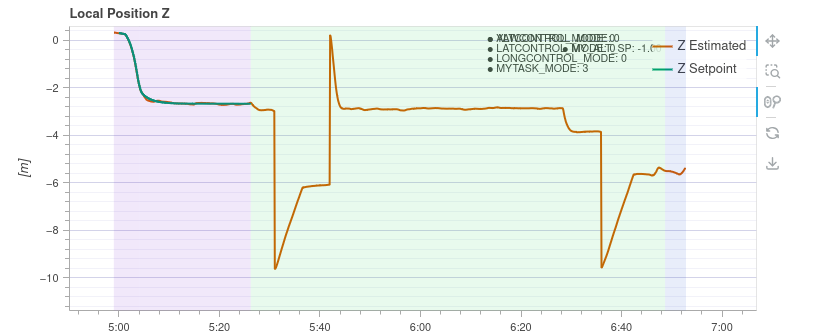
From what I can gather, the bob-ing came from the unexpected jumps in the local position estimate, making the controller want to return to the previous set hover point. What could cause these discontinuities in position estimate?
Note, these discontinuities are also present in the x and y axis, and the drone only has an RTK GNSS (although I am uncertain if the RTK is as accurate as it should be)