I add following line into my .bashrc file to source px4
source /opt/ros/noetic/setup.bash
cd PX4-Autopilot
source Tools/simulation/gazebo-classic/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classic
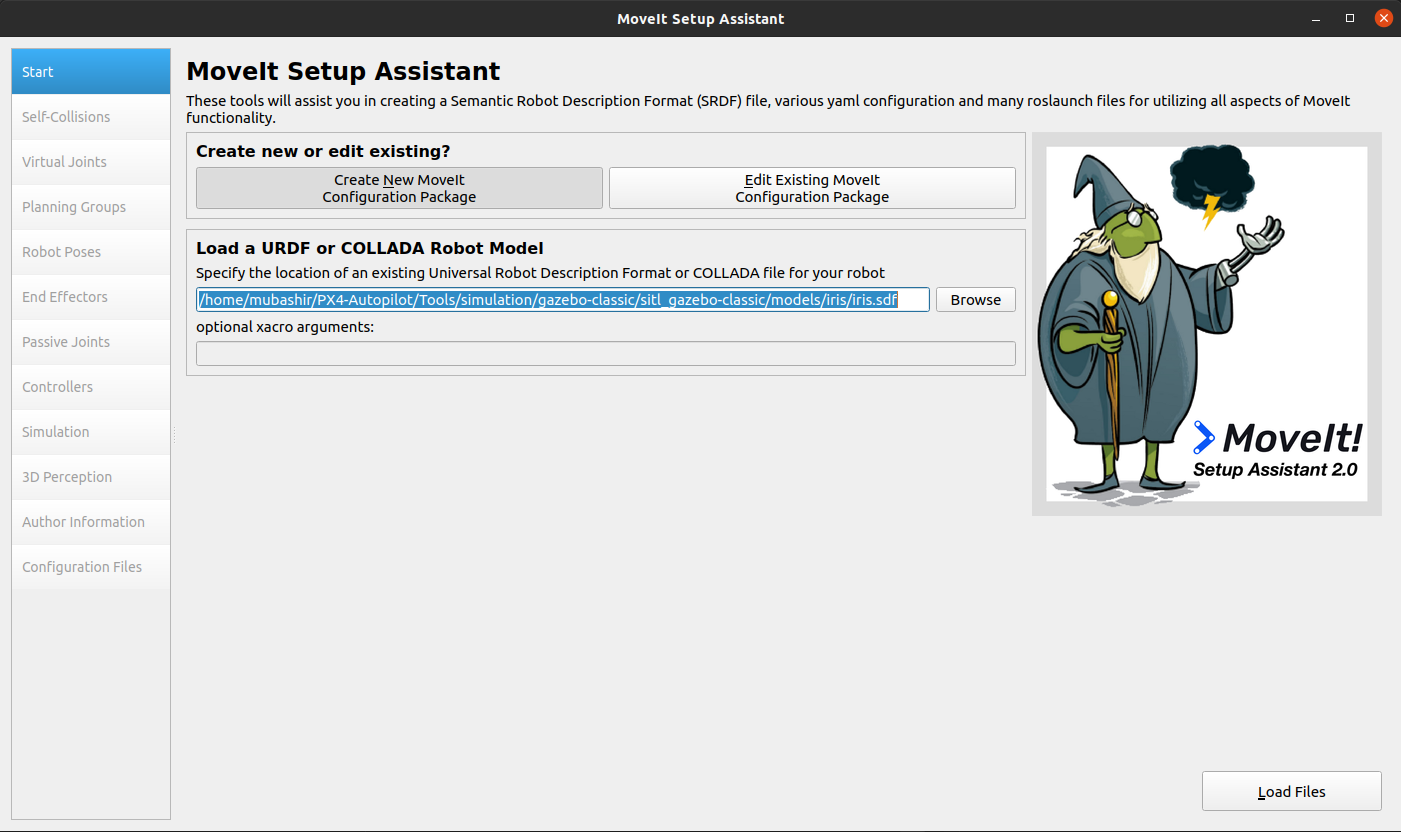
I am using moveit for some waypoint following for indoor UAV I add the .sdf file of the iris /home/mubashir/PX4-Autopilot/Tools/simulation/gazebo-classic/sitl_gazebo-classic/models/iris/iris.sdf in moveit setup assistant
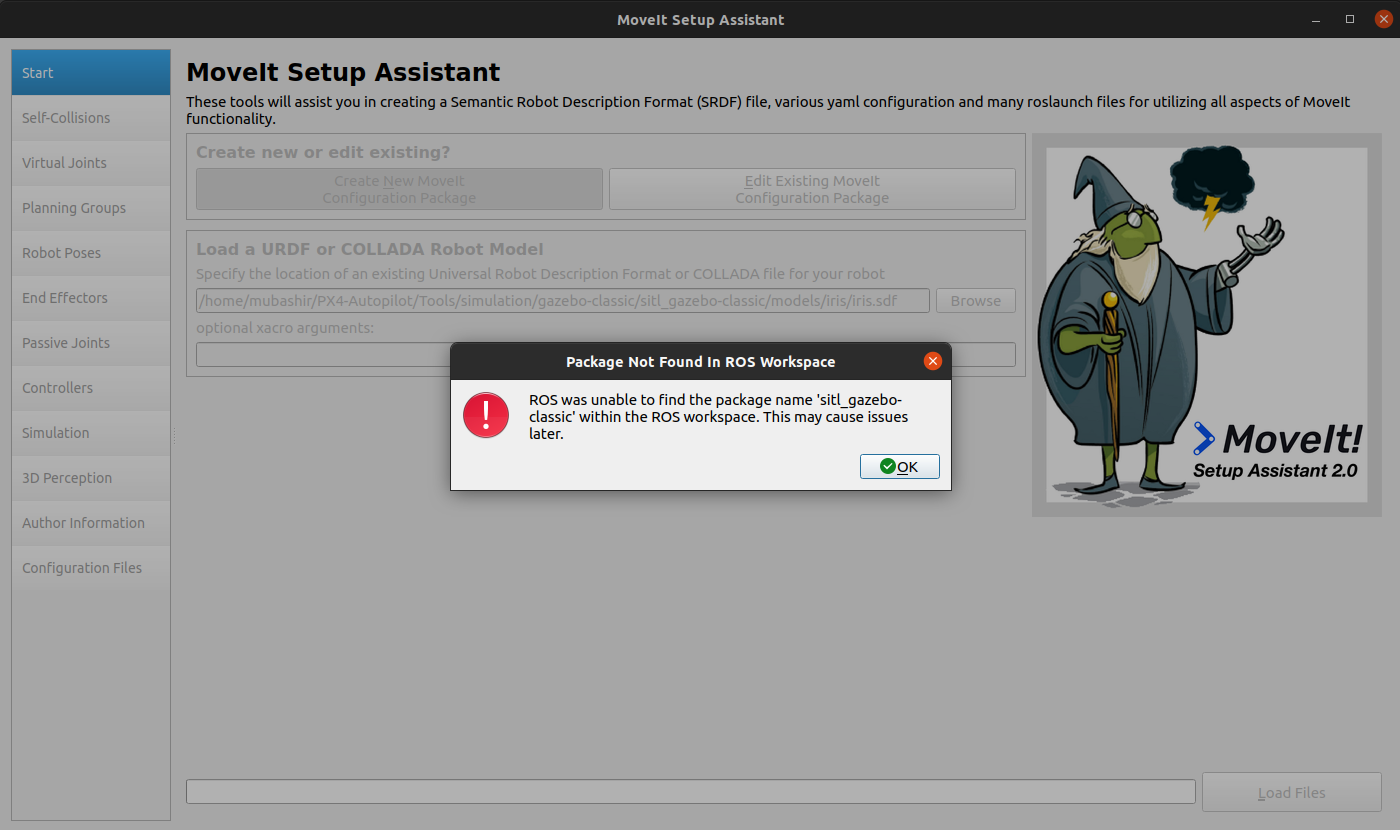
got the following error
ROS was unable to find the package name 'sitl_gazebo-classic' within the ROS workspace. This may cause issues later
URDF/COLLADA file is not a valid robot model.