Hi,
I started an internship in a french drone company last week. The purpose of my internship is to make their VTOL aircraft make a simple flight. The drone has wings and 5 groups of motors.
The fact is I am total beginner in coding drones… I learnt C, Python and some Unix utilisation at school but that’s all. And since nobody knows px4 in the company, I have to start from 0.
For the board, they bought the Pixhawk 3 pro pack (Drotek Autopilots) so I’m currently following the ‘Getting started’ tutorial here : Writing your First Application · PX4 Developer Guide
I managed to install the toolchain and now I’m stuck in the first Hello Sky tutorial :
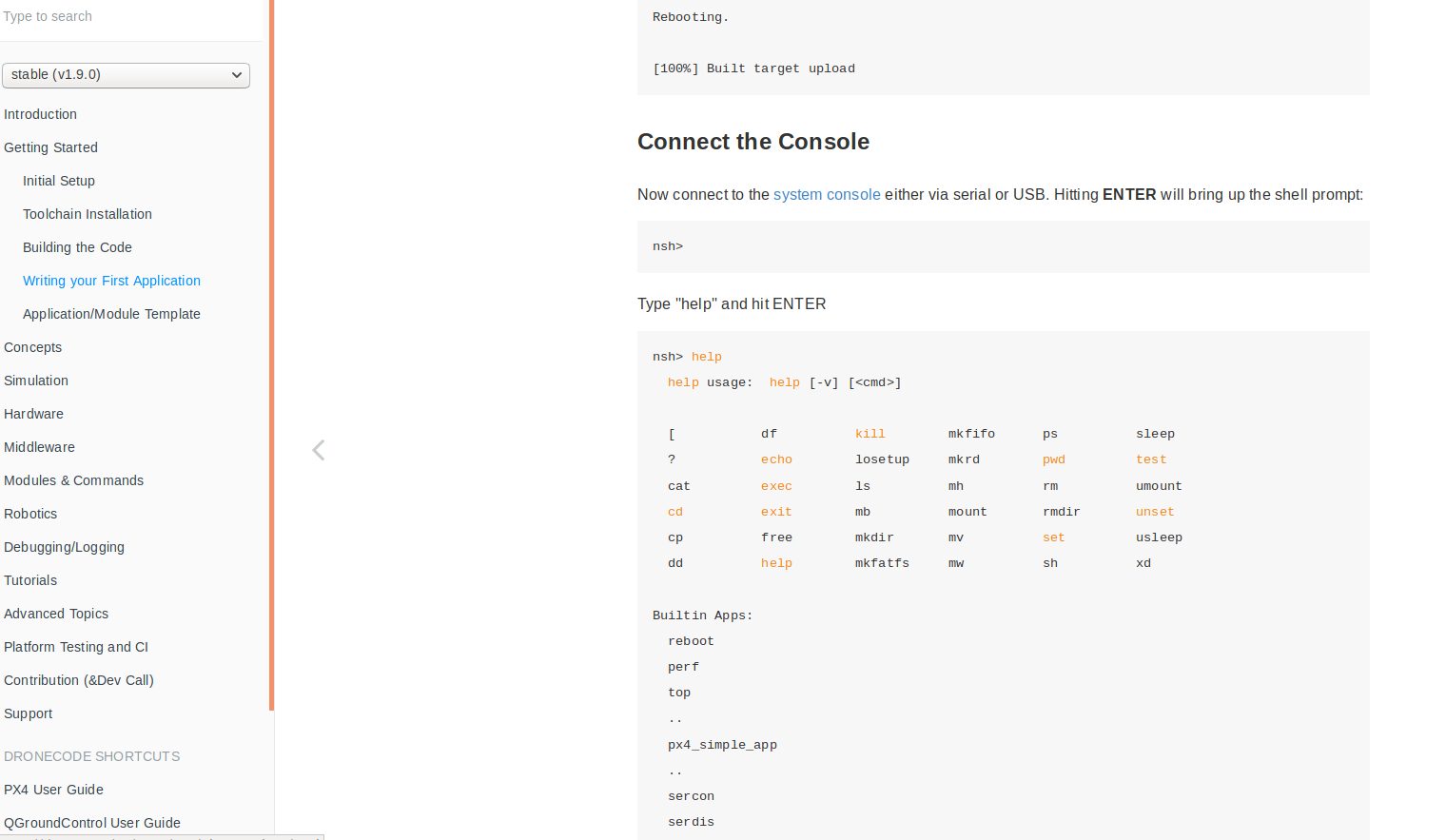
I uploaded the script in the board with USB but now I can’t get this ‘System console’ and I don’t understand what is it precisely. How can I get to this ‘nsh>’ prompt ?
I’m not sure if it’s the right place to post, tell me if it’s not. This project is a real challenge for me so if you have any advices or if you need more precisions please tell me also !!
Are you just trying to get your drone to fly or are you trying to implement some functionality that does not yet exist in PX4?
Either way I think it would be a good idea to start with just getting comfortable using PX4 and flying drones. For this, you should consult the user guide, rather than the developer guide.
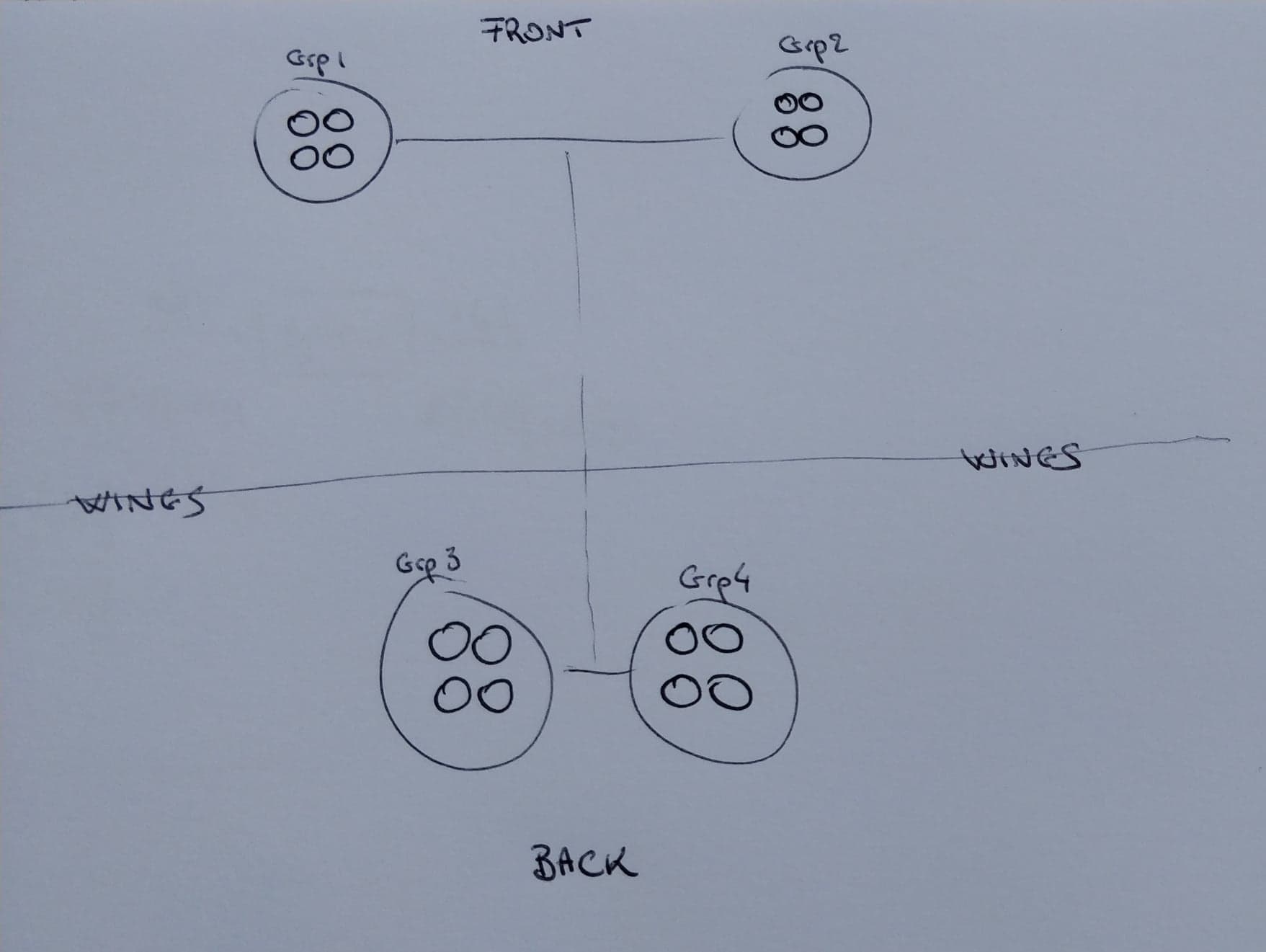
Hi ! For the moment, my objective is just to make the drone fly vertically and stabilize but there is no similar model existing so I think I will have to adapt an existing one. Do you think I can manage without touching the development part ? I have a lot of motors (16) to put into groups in order to simplify the model and approach the generic quadrotor airframe. The problem is that the patern of the groups of motors doesn’t fit with usual X… It is more like a trapezium :
Once this will be done, I will have to deal with the horizontal movement. The aircraft has two deployable wings with a motor on each (for horizontal propulsion) and the horizontal motors at the front must be able to rotate in order to help them.
By the way, I finally found where I can launch the nsh> console ! (./Tools/mavlink_shell.py) I’m going to continue the tutorials (I’m following the user guide also)
Hey @Tiagoo , hope this finds you well. I am also new at this and I started with the first application. I’ve learnt how to subscribe and read data, but I can’t seem to be able to control the quad in JMAVSim and move it around. I understand the code in here, and I have tried publishing to a couple of message topics like vehicle_attitude_control and actuator_controls to fly the quad in JMAVSim through my C code, but to no success.
How do you think I can solve this problem?
Here’s the code I used for vehicle_attitude_control:-