I’ve been looking for how to fly drones where I can’t use gps.
I have seen fake_gps, fake_imu, etc. in the PX4-Autopilot (1.14) file.
I was curious, so I ran it on gazebo garden.
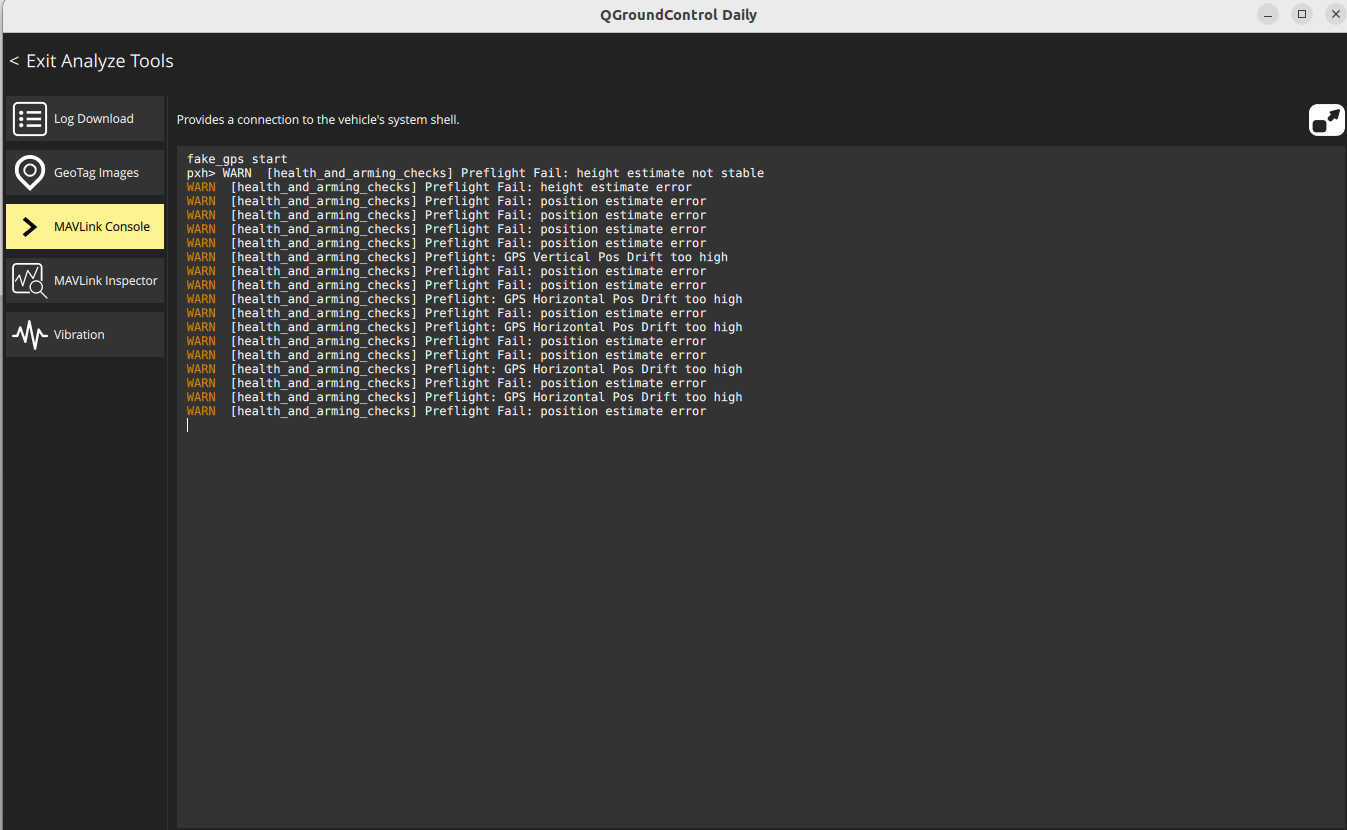
fake_gps start
pxh> WARN [health_and_arming_checks] Preflight Fail: height estimate not stable
WARN [health_and_arming_checks] Preflight Fail: height estimate error
WARN [health_and_arming_checks] Preflight Fail: position estimate error
WARN [health_and_arming_checks] Preflight Fail: position estimate error
WARN [health_and_arming_checks] Preflight Fail: position estimate error
WARN [health_and_arming_checks] Preflight Fail: position estimate error
WARN [health_and_arming_checks] Preflight: GPS Vertical Pos Drift too high
WARN [health_and_arming_checks] Preflight Fail: position estimate error
WARN [health_and_arming_checks] Preflight Fail: position estimate error
WARN [health_and_arming_checks] Preflight: GPS Horizontal Pos Drift too high
WARN [health_and_arming_checks] Preflight Fail: position estimate error
WARN [health_and_arming_checks] Preflight: GPS Horizontal Pos Drift too high
WARN [health_and_arming_checks] Preflight Fail: position estimate error
WARN [health_and_arming_checks] Preflight Fail: position estimate error
WARN [health_and_arming_checks] Preflight: GPS Horizontal Pos Drift too high
WARN [health_and_arming_checks] Preflight Fail: position estimate error
WARN [health_and_arming_checks] Preflight: GPS Horizontal Pos Drift too high
WARN [health_and_arming_checks] Preflight Fail: position estimate error
An error appears as above, is this normal?
Can I use it right away for an actual drone?
When do you use the rest of the fake functions?
I can’t find an explanation on the official website, so I’m asking you a question.
Is there any other data I can refer to?