Was testing VehicleTrajectoryBezier (UORB message) | PX4 Guide (main)
in offboard mode in px4_sitl
Was able to arm the drone and then publish the VehicleTrajectoryBezier topic to /fmu/in/vehicle_trajectory_bezier
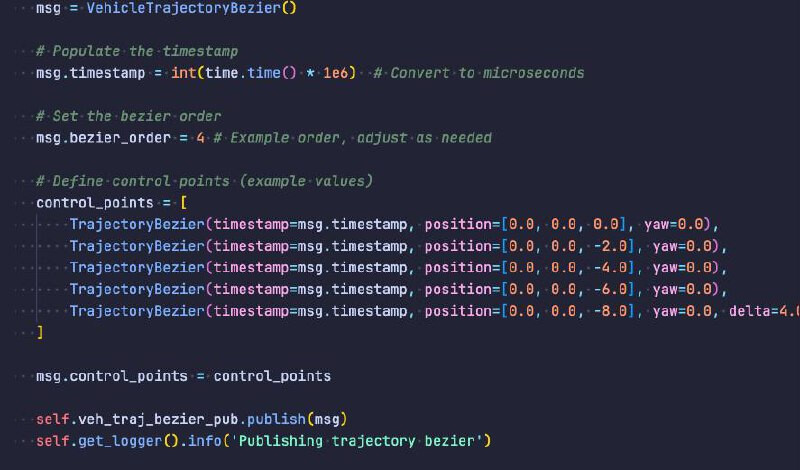
However the drone was did not takeoff based on the trajectory setpoints published in the messsage