PX4 version: release/1.13
gazebo 11, ubuntu 20.04
for iris_ctrlalloc.sdf, it load the default params in rc.mc_defaults:
set VEHICLE_TYPE mc
# MAV_TYPE_QUADROTOR 2
param set-default MAV_TYPE 2
if param compare IMU_GYRO_RATEMAX 400
then
param set-default IMU_GYRO_RATEMAX 800
fi
param set-default NAV_ACC_RAD 2
param set-default RTL_RETURN_ALT 30
param set-default RTL_DESCEND_ALT 10
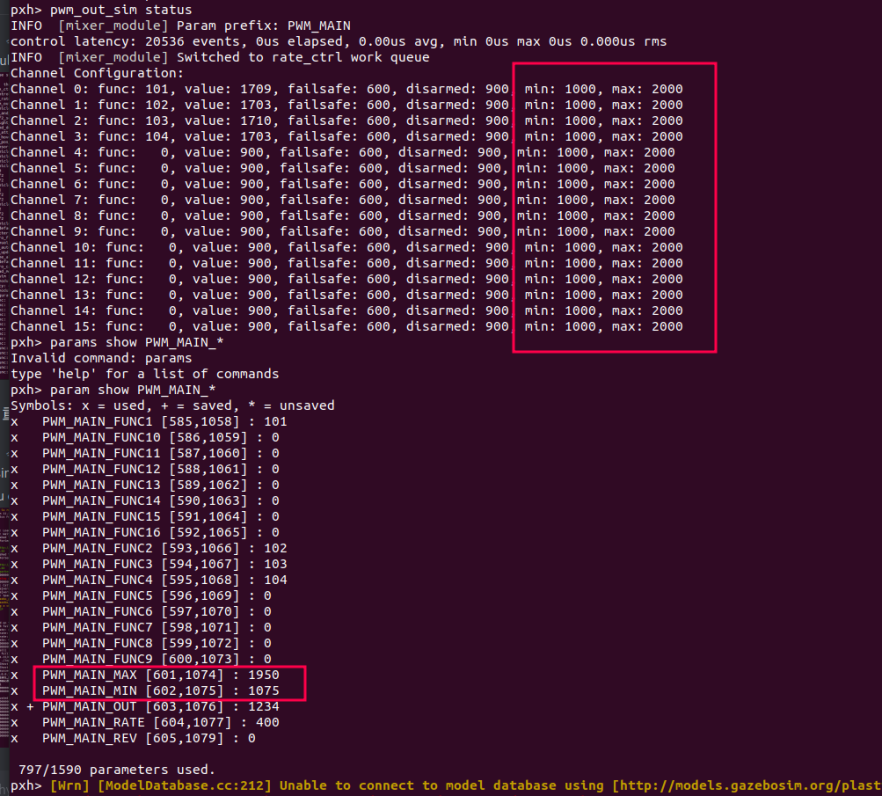
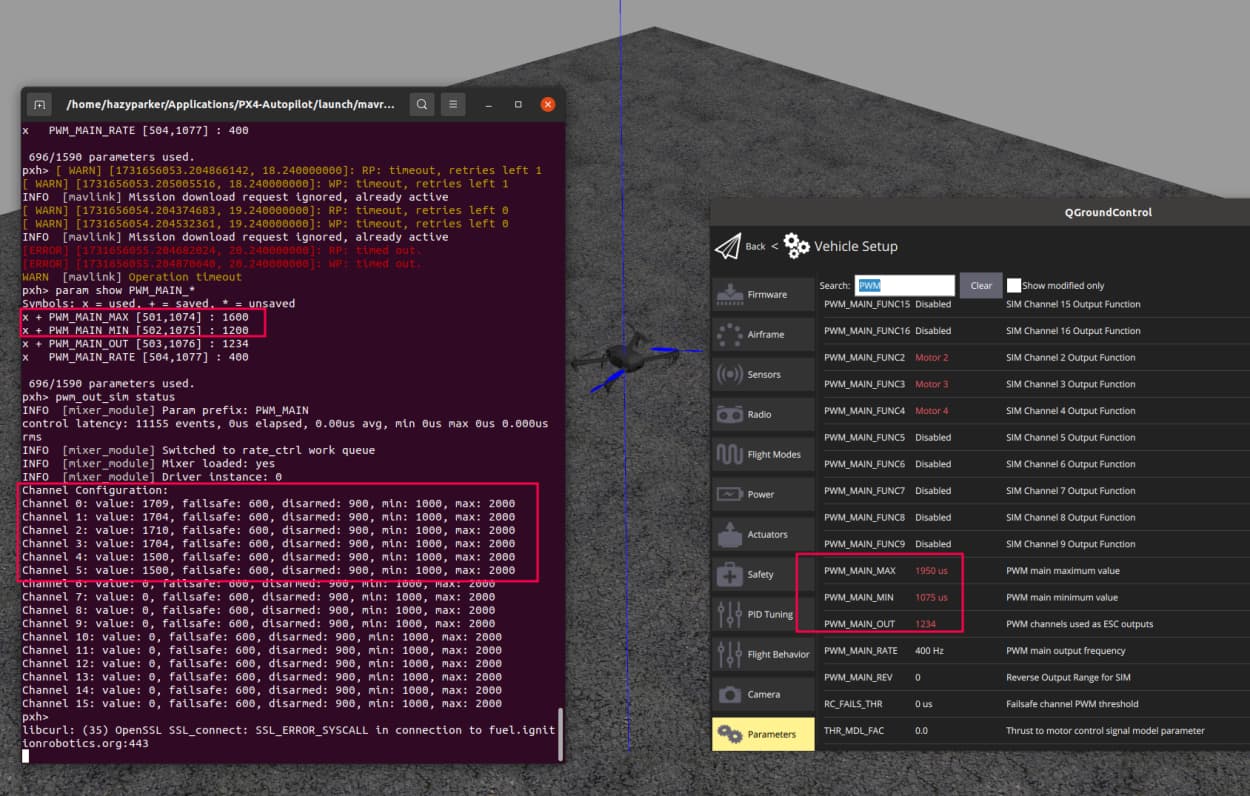
param set-default PWM_MAIN_MAX 1950
param set-default PWM_MAIN_MIN 1075
param set-default PWM_MAIN_RATE 400
param set-default GPS_UBX_DYNMODEL 6
#
# This is the gimbal pass mixer.
#
set MIXER_AUX pass
set MIXER quad_x
set PWM_OUT 1234
set PWM_AUX_OUT 1234
and in 10017 iris_ctrlalloc,
. ${R}etc/init.d/rc.mc_defaults
param set-default SYS_CTRL_ALLOC 1
param set-default CA_AIRFRAME 0
param set-default CA_ROTOR_COUNT 4
param set-default CA_ROTOR0_PX 0.1515
param set-default CA_ROTOR0_PY 0.245
param set-default CA_ROTOR0_KM 0.05
param set-default CA_ROTOR1_PX -0.1515
param set-default CA_ROTOR1_PY -0.1875
param set-default CA_ROTOR1_KM 0.05
param set-default CA_ROTOR2_PX 0.1515
param set-default CA_ROTOR2_PY -0.245
param set-default CA_ROTOR2_KM -0.05
param set-default CA_ROTOR3_PX -0.1515
param set-default CA_ROTOR3_PY 0.1875
param set-default CA_ROTOR3_KM -0.05
param set-default PWM_MAIN_FUNC1 101
param set-default PWM_MAIN_FUNC2 102
param set-default PWM_MAIN_FUNC3 103
param set-default PWM_MAIN_FUNC4 104
set MIXER skip
set MIXER_AUX none
then I revised vehicle in mavros_posix_sitl.launch, and launch ,but got this:
then I tried iris.sdf without control allocator:
weirder.
so how to make PWM_MAIN_MIN and MAX effective?
thanks for any advice and suggestion.