Hi.
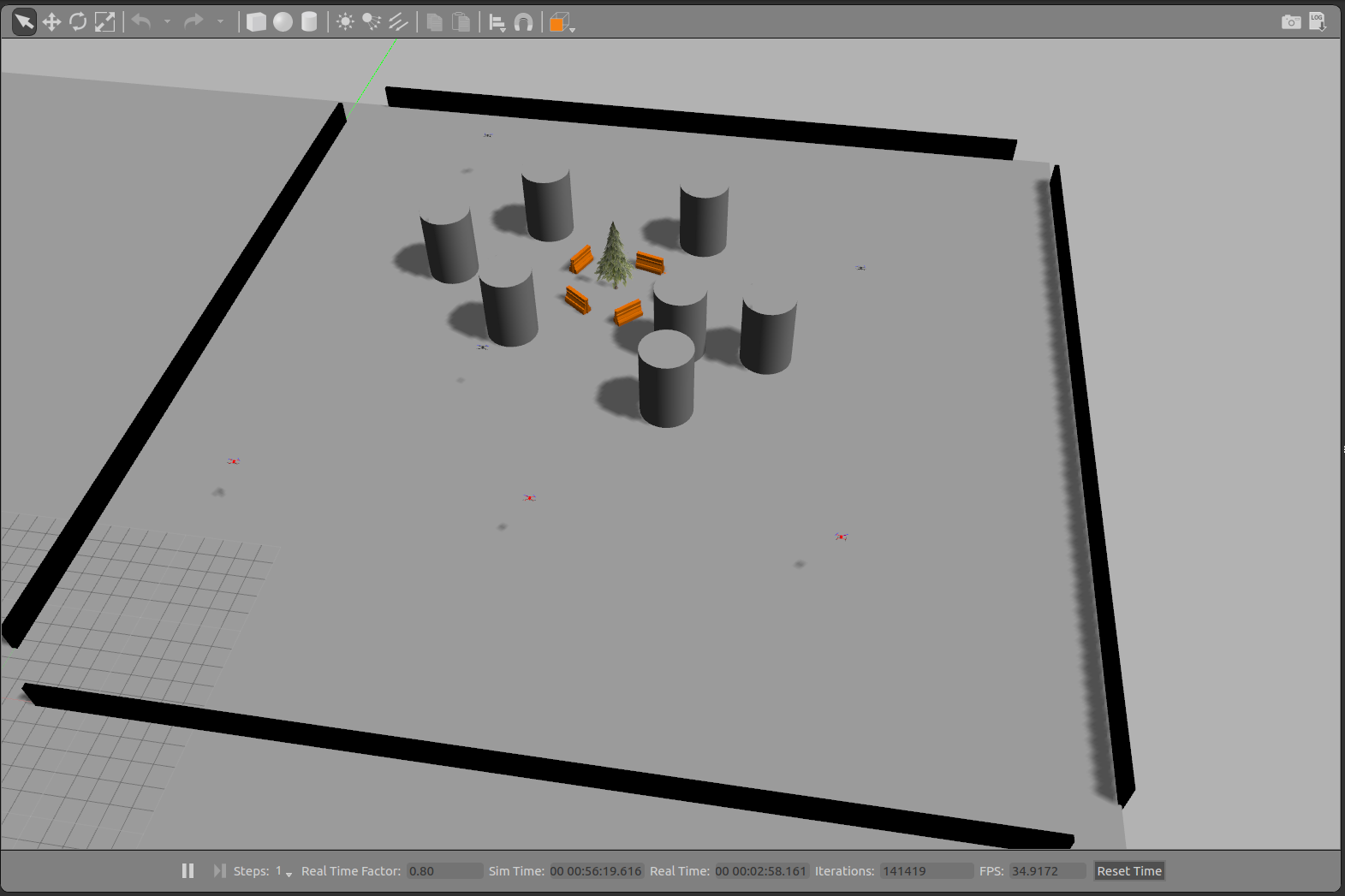
I am doing multi-vehicle simulation in Gazebo. All works fine except that the ‘Real Time Factor’ in Gazebo is less than one, and it decreases when I add more vehicles. The following picture shows a simulation snapshot of 6 drones (I want to add more!). I am using mavros to interface to PX4.
Here are the issues
- As you can see, the real time factor is less than 1
- in the terminal where I run the SITLs of all vehicles, I get a flood of
ERROR [mavlink] [timesync] Hard setting offset.
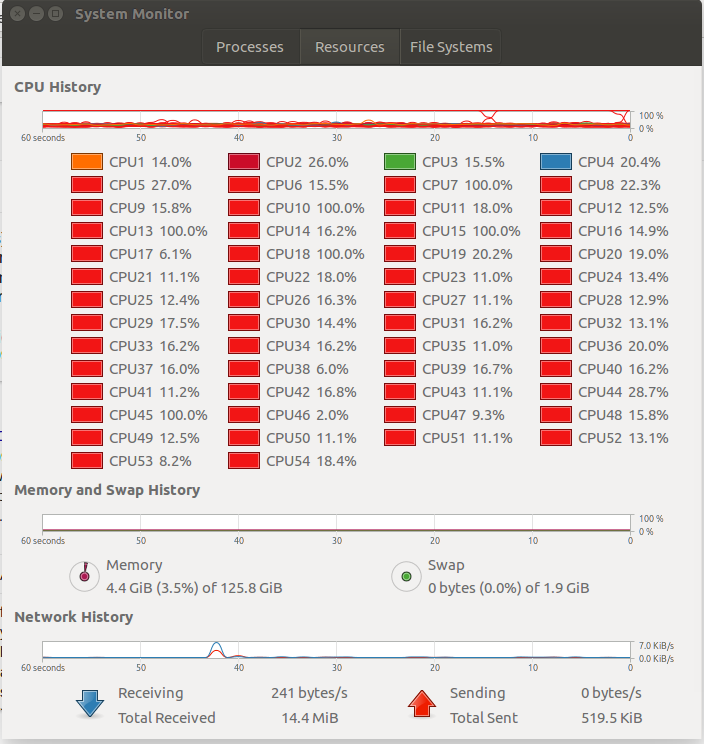
I guess I have a good machine with 56 cores and 126G RAM.
Here is the sys monitor during the simulation:
Question 1 Are these error message fine to ignore, or they indicate serious issues?
Question 2 How can I keep the real-time factor in Gazebo at 1, if the machine specs are sufficient?
More info
- using Ubuntu 16 with ROS Kinetic
- using
masterbranch of PX4 at commit78a9658; not latest!
Thanks.