Hello! How to get the location of the drone when it was just connected? I used the position() function but it didn’t work.
Please share the full output of what you saw.
1 Like
Sorry, I use position() function of class Telemetry and print position.latitude_deg and position.longitude_deg to console, but it print 'nan’
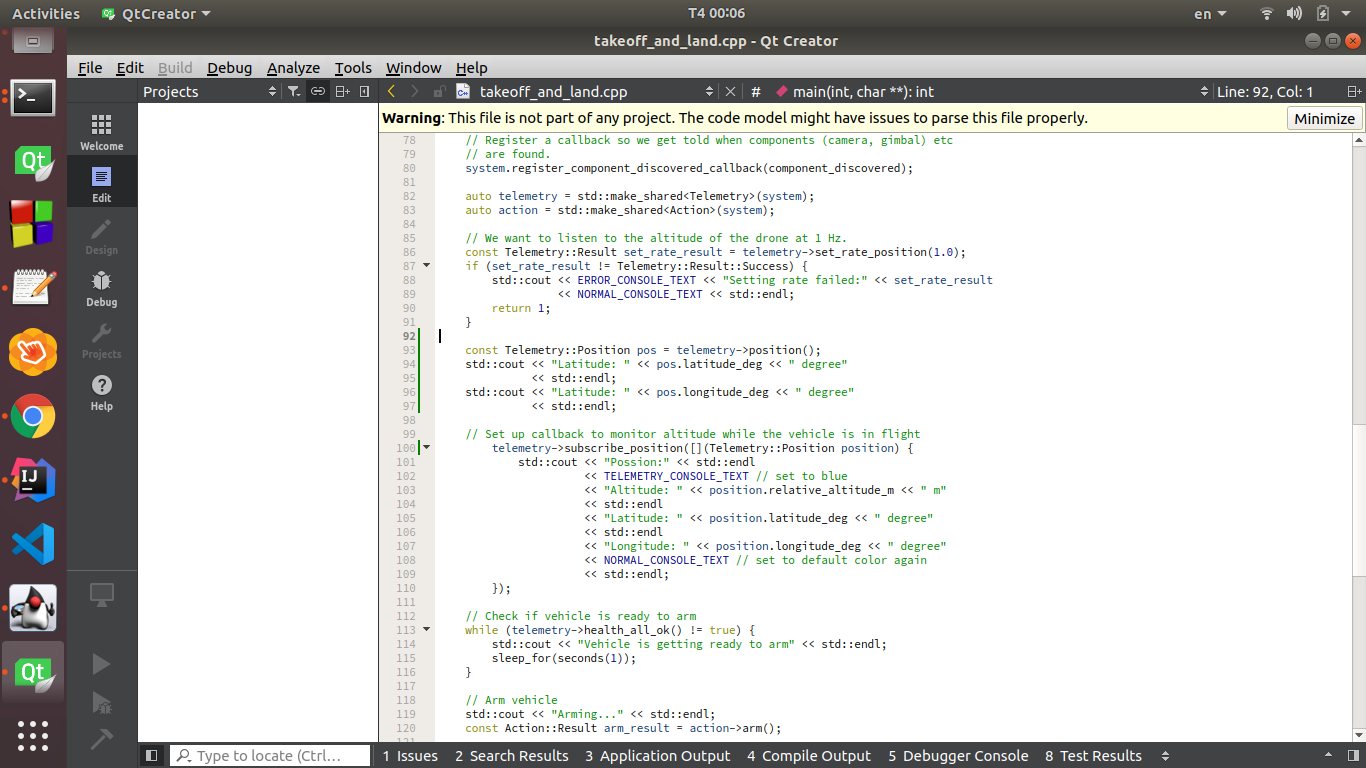
and my code change in takeoff_and_land
Looks correct. And what’s the output?
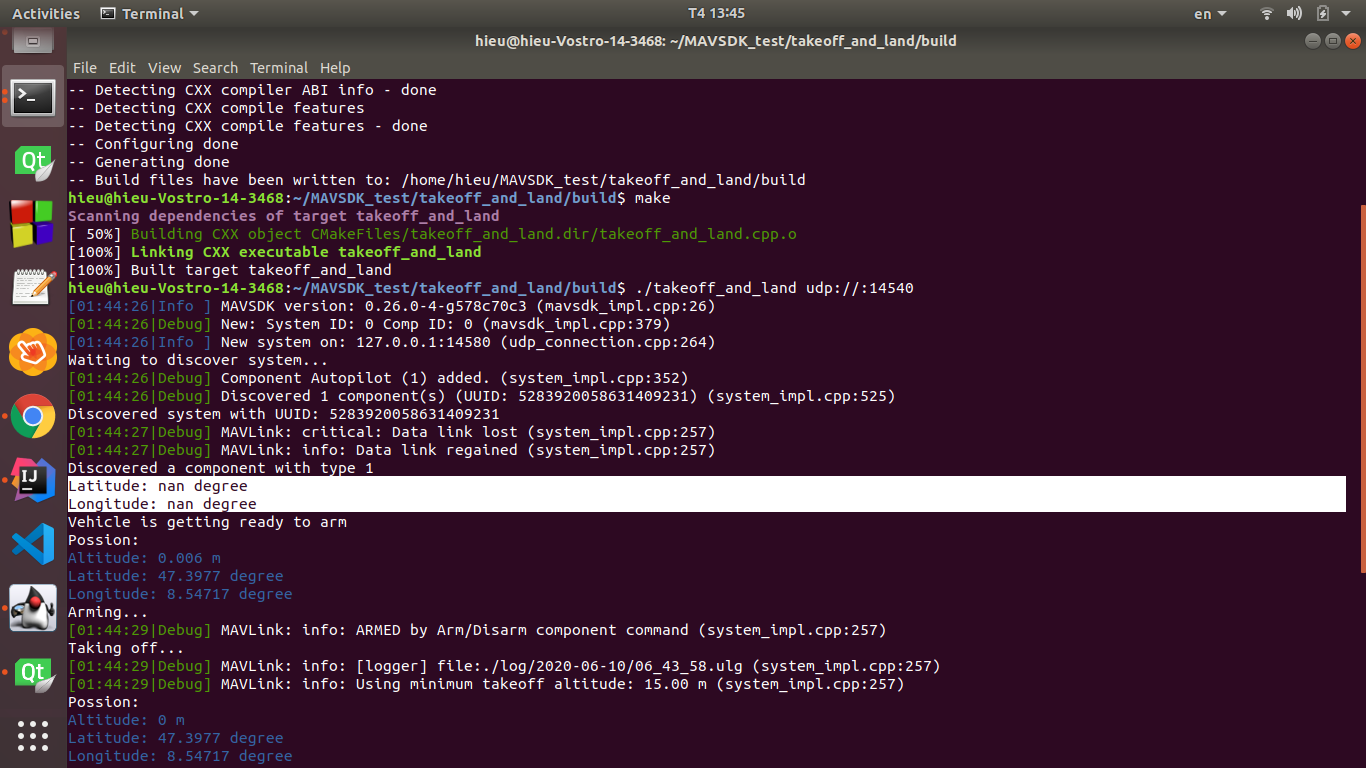
In the very beginning it has not received any position updates yet, so the data is still nan (not a number). Once it has received data it shows it.
If you did telemetry->position() later it should work.
1 Like
Thank you! I will use it carefully.