Hai,
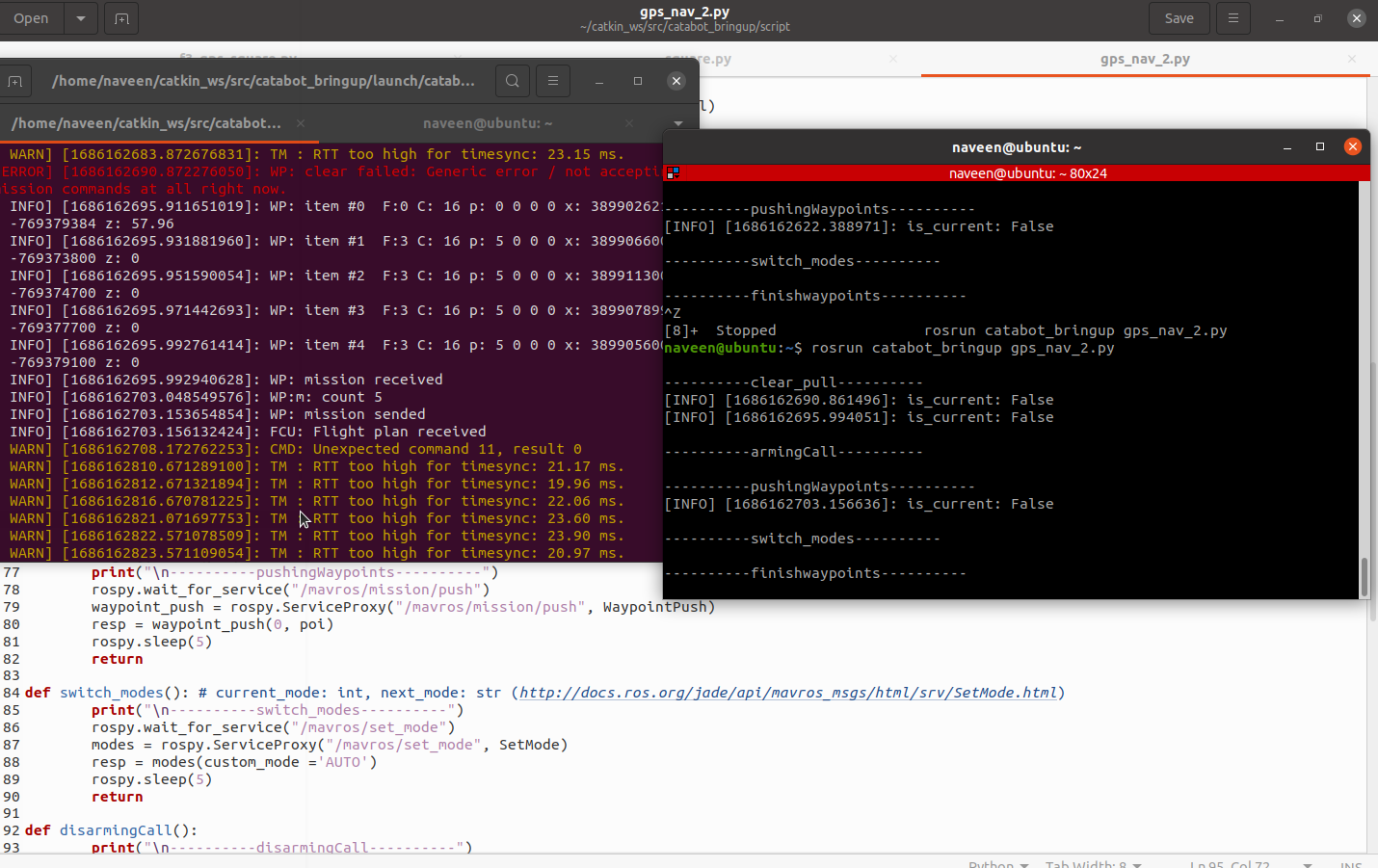
I am trying to do GPS-aided navigation using MAVROS for my ASV(2-thruster configuration). I am using my computer as the ROS master and a Pixhawk 6C. The code shown below pushes the waypoints to the FCU and then switches the FCU to ‘AUTO’ mode. But after pushing the waypoints I am getting the following error:
WARN] [1686162708.172762253]: CMD: Unexpected command 11, result 0
I am using ArduRover V4.2.3
This is the code I am using for GPS navigation using MAVROS:
#!/usr/bin/env python
import rospy
import mavros
import sensor_msgs
import yaml
from mavros_msgs.msg import *
from mavros_msgs.srv import *
from std_msgs.msg import String
from sensor_msgs.msg import NavSatFix
latitude = 0.0
longitude = 0.0
altitude = 0.0
last_waypoint = False
flight_altitude = 3 # Check altitude value before experiments
def waiter(condition):
while True:
if condition:
return
else:
rospy.sleep(2)
def waypoint_callback(data):
# print("\n----------waypoint_callback----------")
global last_waypoint
# rospy.loginfo("Got waypoint: %s", data)
if len(data.waypoints) != 0: # If waypoint list is not empty
rospy.loginfo("is_current: %s", data.waypoints[len(data.waypoints)-1].is_current)
last_waypoint = data.waypoints[len(data.waypoints)-1].is_current # Checks status of "is_current" for last waypoint
def globalPosition_callback(data):
# print("\n----------globalPosition_callback----------")
global latitude
global longitude
global altitude
latitude = data.latitude
longitude = data.longitude
altitude = data.altitude
def clear_pull():
print("\n----------clear_pull----------")
# Clearing waypoints
rospy.wait_for_service("/mavros/mission/clear")
waypoint_clear = rospy.ServiceProxy("/mavros/mission/clear", WaypointClear)
resp = waypoint_clear()
rospy.sleep(5)
# Call waypoints_pull
rospy.wait_for_service("/mavros/mission/pull")
waypoint_pull = rospy.ServiceProxy("/mavros/mission/pull", WaypointPull)
resp = waypoint_pull()
rospy.sleep(5)
return
def finishWaypoints():
print("\n----------finishwaypoints----------")
while True: # Waits for last_waypoint in previous WaypointList to be visited
rospy.sleep(2)
# Waiting for last_waypoint to be true
if last_waypoint == True: # If last_waypoint is in the process of being visited
while True:
rospy.sleep(2)
# Waiting for last_waypoint to be false
if last_waypoint == True: # If last_waypoint has been visited (due to previous constraint)
break
break
return
def armingCall():
print("\n----------armingCall----------")
rospy.wait_for_service("/mavros/cmd/arming")
asv_arm = rospy.ServiceProxy("/mavros/cmd/arming", CommandBool)
resp = asv_arm(True)
rospy.sleep(2)
def pushingWaypoints(poi):
print("\n----------pushingWaypoints----------")
rospy.wait_for_service("/mavros/mission/push")
waypoint_push = rospy.ServiceProxy("/mavros/mission/push", WaypointPush)
resp = waypoint_push(0, poi)
rospy.sleep(5)
return
def switch_modes(): # current_mode: int, next_mode: str (http://docs.ros.org/jade/api/mavros_msgs/html/srv/SetMode.html)
print("\n----------switch_modes----------")
rospy.wait_for_service("/mavros/set_mode")
modes = rospy.ServiceProxy("/mavros/set_mode", SetMode)
resp = modes(custom_mode ='AUTO')
rospy.sleep(5)
return
def disarmingCall():
print("\n----------disarmingCall----------")
rospy.wait_for_service("/mavros/cmd/arming")
asv_arm = rospy.ServiceProxy("/mavros/cmd/arming", CommandBool)
resp = asv_arm(False)
rospy.sleep(2)
def main():
rospy.init_node('gps_navigation_node', anonymous=True)
rospy.Subscriber("/mavros/mission/waypoints", WaypointList, waypoint_callback)
rospy.Subscriber("/mavros/global_position/raw/fix", NavSatFix, globalPosition_callback)
#readyBit = rospy.Publisher("/mavros/ugv/ready", String, queue_size=10) # Flag topic
clear_pull()
armingCall()
waypoints = [
Waypoint(frame = 3, command = 16, is_current = 0, autocontinue = True, param1 = 5, x_lat = 38.99044, y_long = -76.93776, z_alt = 0),
Waypoint(frame = 3, command = 16, is_current = 0, autocontinue = True, param1 = 5, x_lat = 38.99066, y_long = -76.93738, z_alt = 0),
Waypoint(frame = 3, command = 16, is_current = 0, autocontinue = True, param1 = 5, x_lat = 38.99113, y_long = -76.93747, z_alt = 0),
Waypoint(frame = 3, command = 16, is_current = 0, autocontinue = True, param1 = 5, x_lat = 38.99079, y_long = -76.93777, z_alt = 0),
Waypoint(frame = 3, command = 16, is_current = 0, autocontinue = True, param1 = 5, x_lat = 38.99056, y_long = -76.93791, z_alt = 0)
]
pushingWaypoints(waypoints)
switch_modes() #changing from manual mode to auto mode
finishWaypoints()
rospy.sleep(10)
disarmingCall()
print("Mission completed")
rospy.spin()
if __name__ == '__main__':
main()
It would be really helpful if someone can solve the issue.