I was told to move the servo by using MAVROS. The servo must be connected to pixhawk. Now I connect the servo to the pixhawk and able to subscribe imu topic. However, I still haven’t figured out how to move the servo in any degrees. Please kindly teach me how to do it. I am still new to odroid and pixhawk.

Try as describe in this link. The aim is to send signals to servo connected to pixhawk, using ROS node.
https://aerial-robotics-iitk.gitbook.io/wiki/tutorials/custom-mavros-message
I could not find the firmware file in Odroid. Does it mean that I have to get it from the website? Furthermore, after doing this, how do I run it?
@bkueng Could you please help me to solve this?

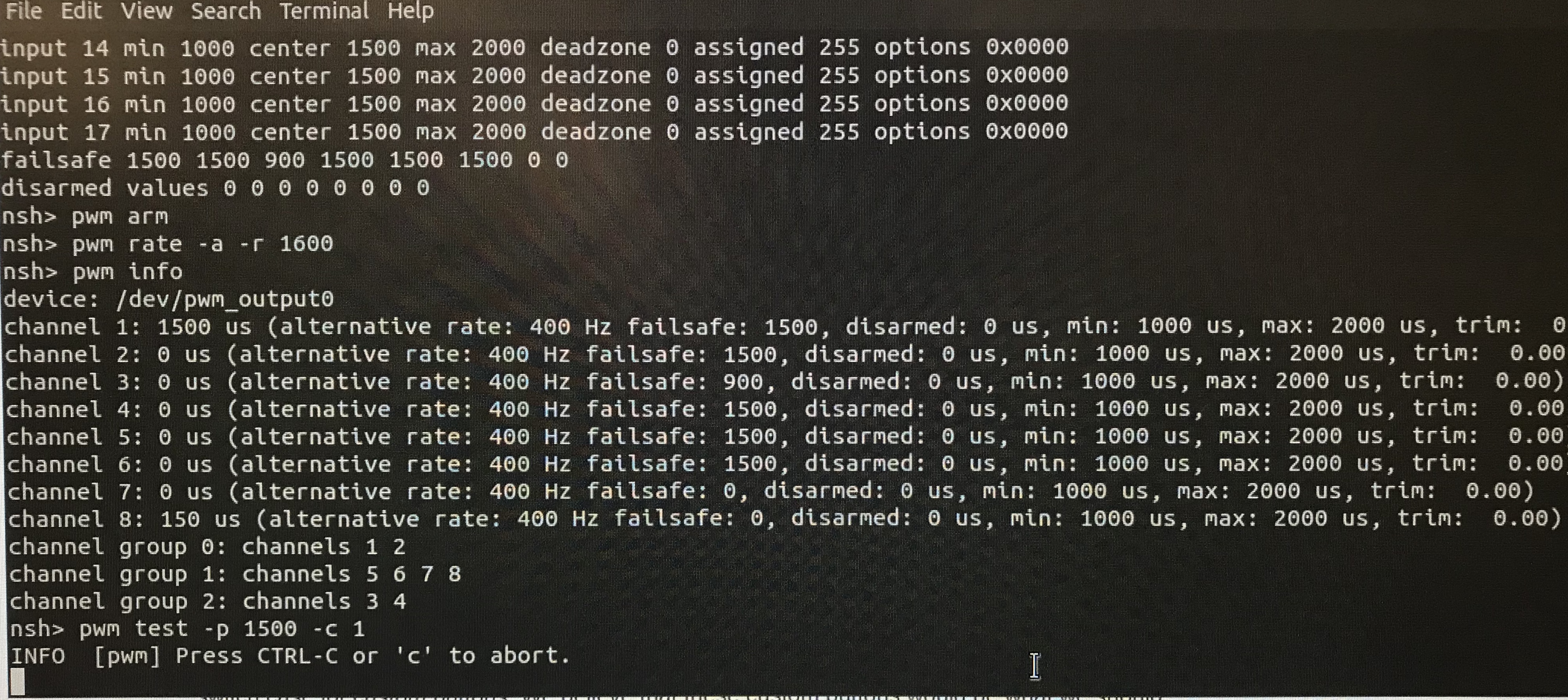
Did you try pwm test -p 1500 -c 1?
Thanks for the quick reply. I will try it ASAP and let you know.
@bkueng Here is what I get.