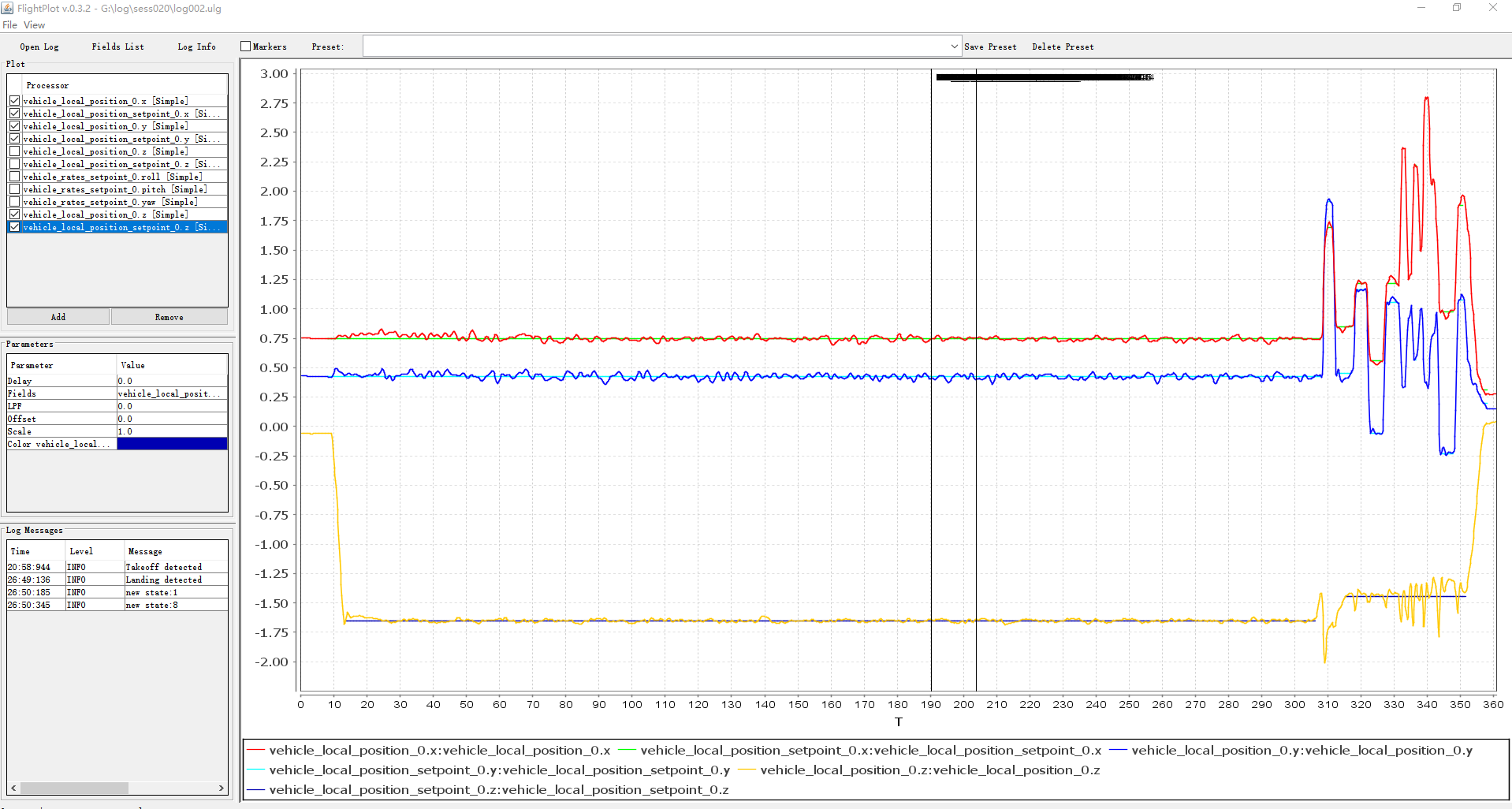
No matter how I change the parameters, the control performace is not improved.The data is as followed.
How can I get a good control performance with slow drift?