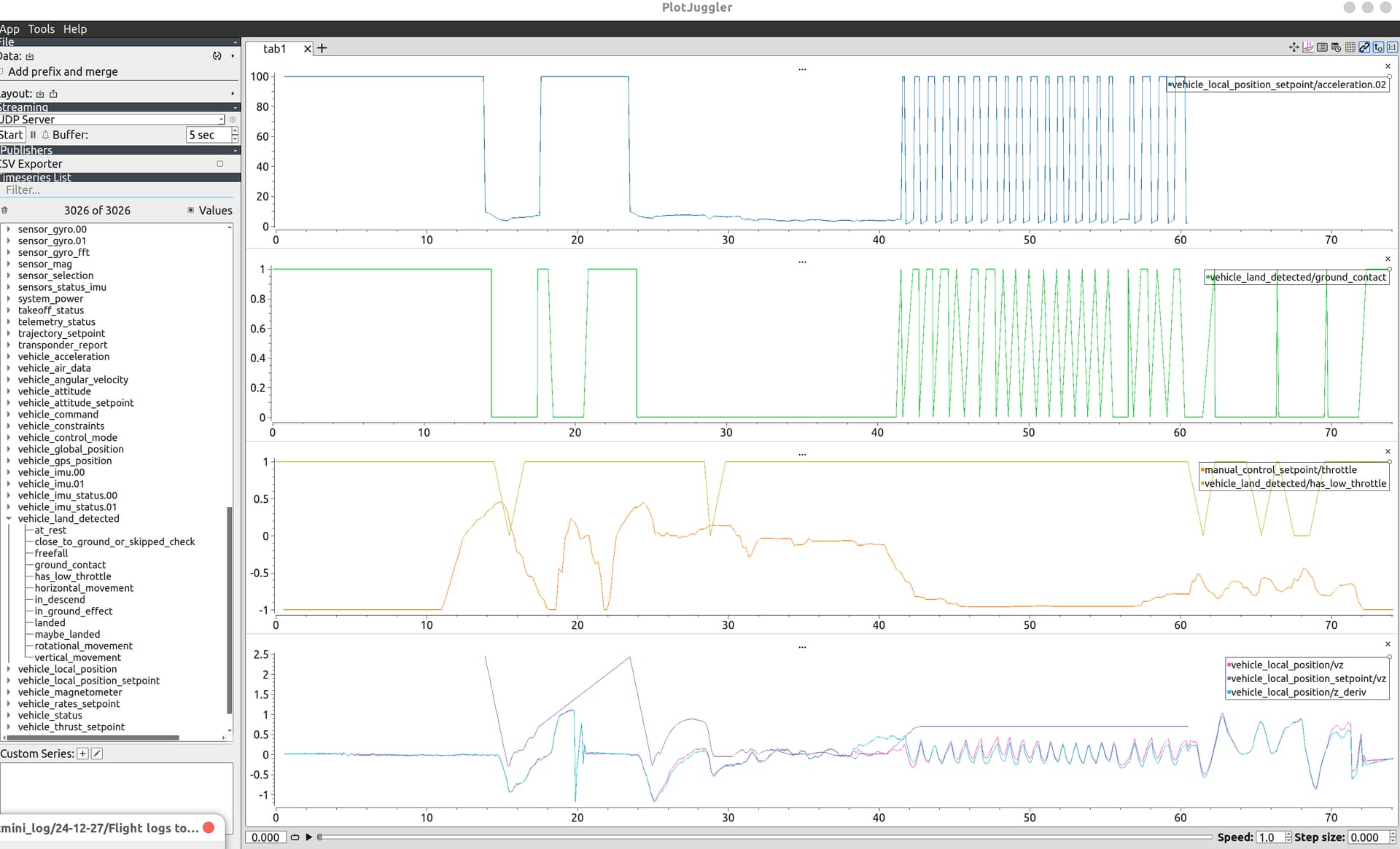
When I was testing the helicopter, I found that when the throttle stick was low in position mode, the ground touchdown detection would be triggered by mistake, causing the helicopter to jump out of control in the air.
The flight log for reproducing the problem is as follows
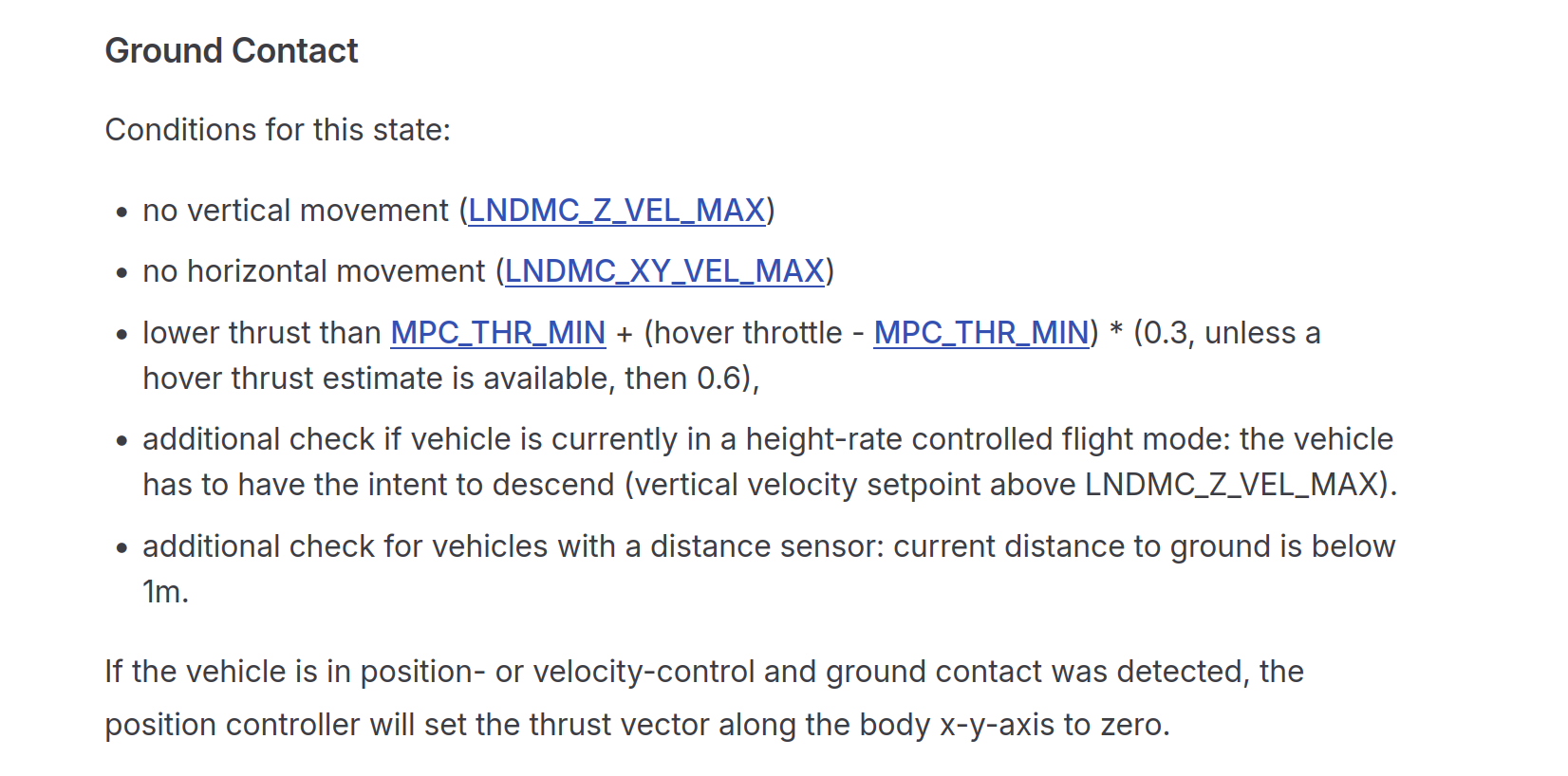
The following conditions may seem harsh for multi-rotors, but for PX4 helicopters, the position control thrust is directly mapped to the collective pitch. There may be a situation where the helicopter is hovering and the remote control throttle position is very low, which leads to all three conditions being met.
Would you mind sharing the log file?
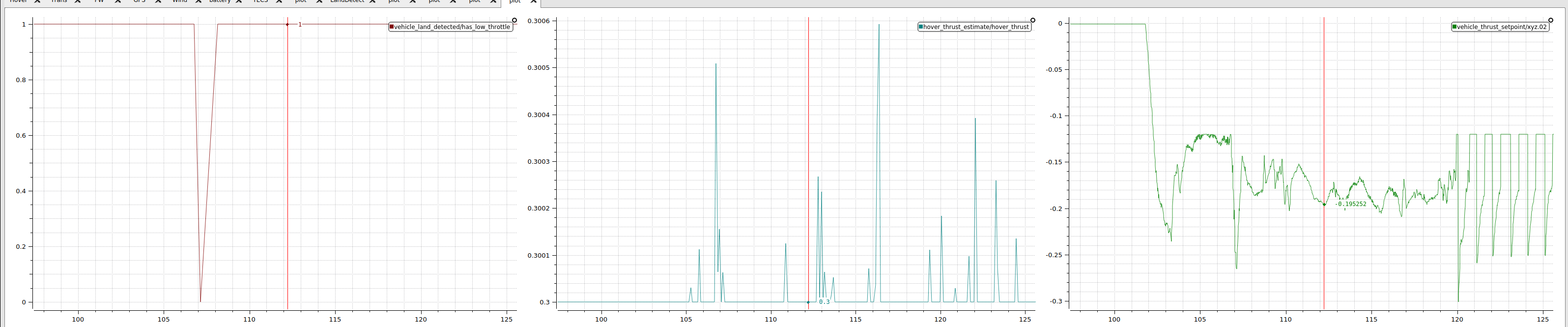
What I don’t get though is why the low thrust condition was met, and for that having access to the log file is the easiest.
We limit the calculation of the hover thrust to +/- HTE_THR_RANGE around MPC_THR_HOVER. As you have the hover set to 0.5 and the range is by default 0.2, the hover thrust estimate is capped at 0.3. I recommend to set MPC_THR_HOVER to a realistic value (about 0.25).