I am testing a flocking algorithm in PX4 SITL with ROS2. I spawn multi vehcile(10-15) in SITL by following the command
termial-1
PX4_SYS_AUTOSTART=4001 PX4_GZ_MODEL_POSE="2,-0.5" PX4_SIM_MODEL=gz_x500 ./build/px4_sitl_default/bin/px4
terminal-2
PX4_SYS_AUTOSTART=4001 PX4_GZ_MODEL_POSE="4,-0.5" PX4_SIM_MODEL=gz_x500 ./build/px4_sitl_default/bin/px4 -i 1
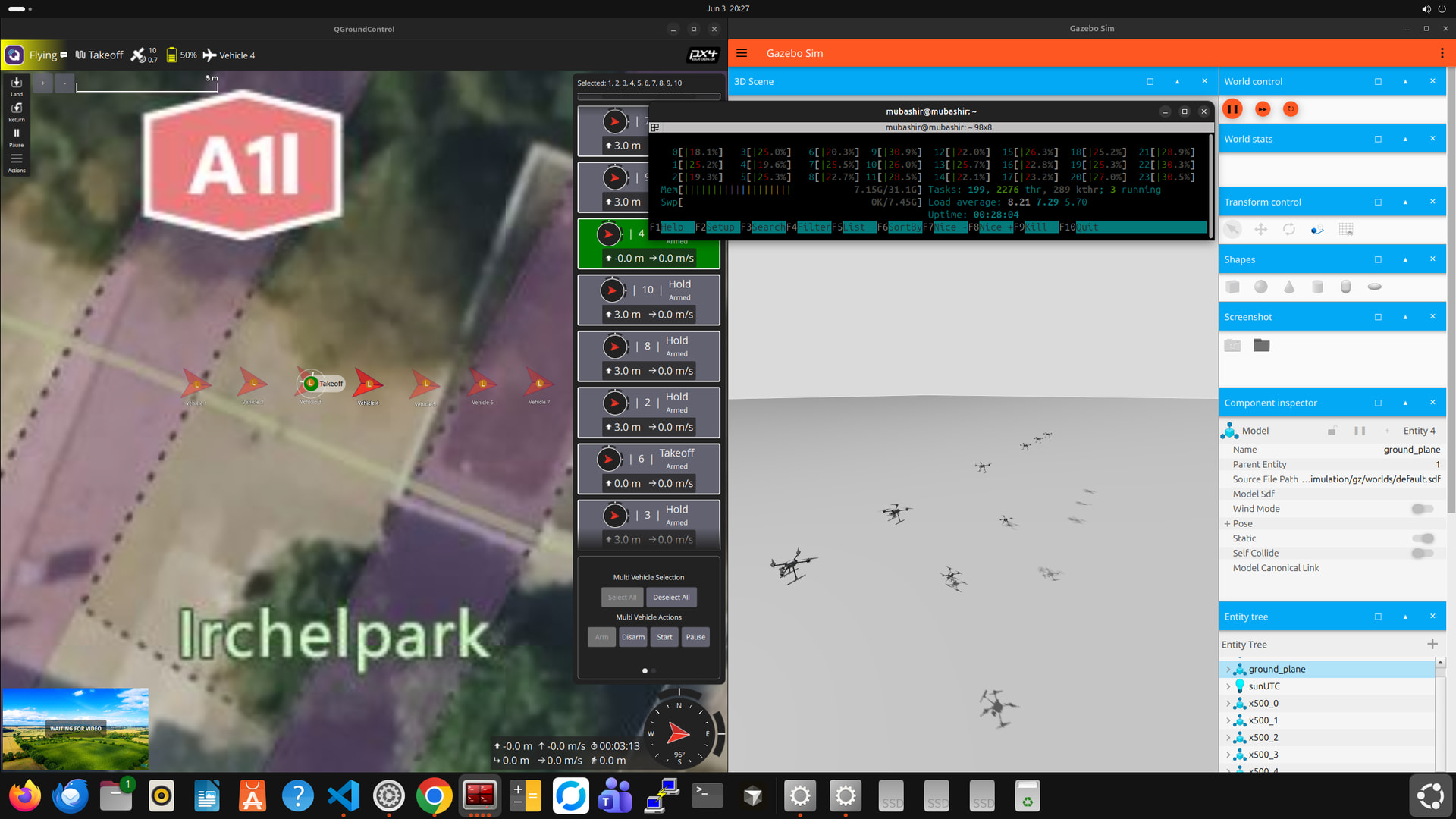
and so on. After takeoff command, some vehicles left on the ground QGC showed flying. The simulation was going fine, CPU consumption is nominal.
SITL SETUP
OS: Ubuntu 24
PX4: 1.17.0alpha
GZ Sim: Harmonic
ROS2: Jazzy