My flight controller is a Cube Orange PX4, and I’m using a ESP32 WifiModule in an Adafruit board, but it is programable in the Arduino IDE.
This is my code:
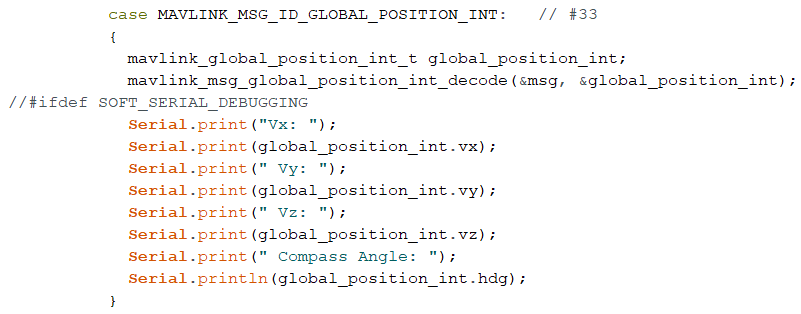
And this is the request of the streams (if I try with the STREAM_ALL the result is the same):

- This stream (GLOBAL_POSITION_INT) provides the ground speed in cm/s (so it’s not angular speed), and I only ask for those values, so I dont know what is this problem.
When I increase the frequency to 0x05 (for example), I also get the first line of data incorrect, but all of the other 5 lines are correct (vx=0, vy=0, vz=0).
I looked in Mission Planner and the values coming from the PX4 are correct, so I dont know what huge and ridiculous values are that.
Also, in each cycle these wrong values are random, like: it goes from 30000 to -25244 to 523.
Best regards