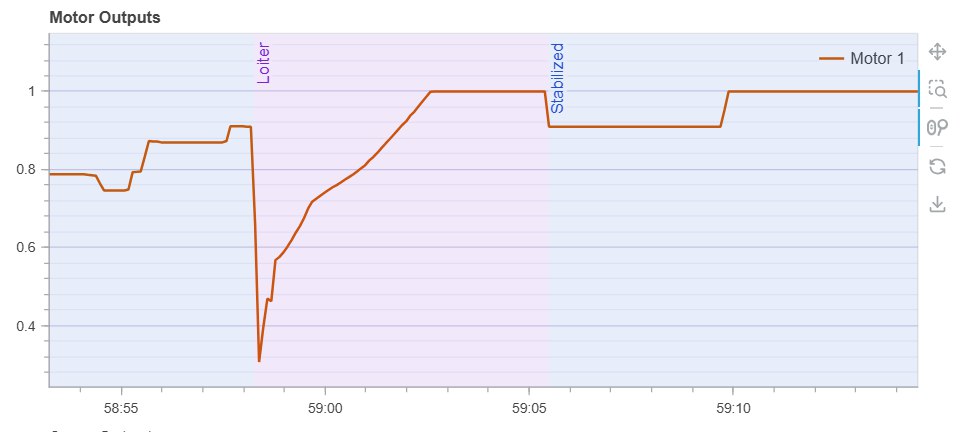
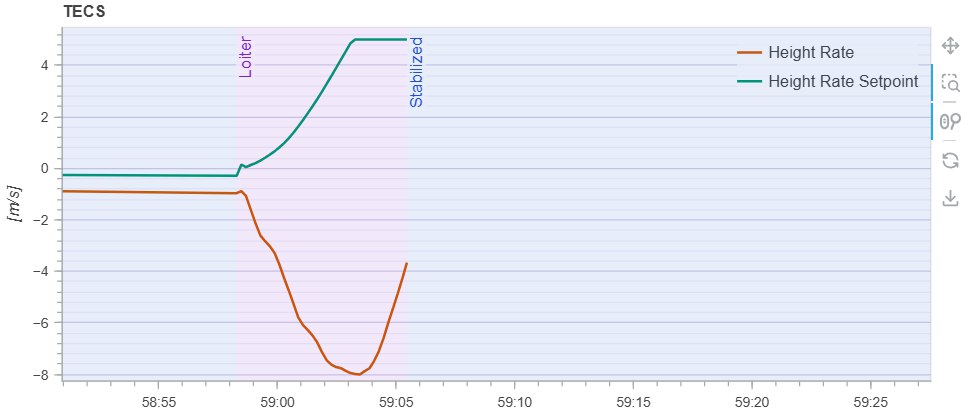
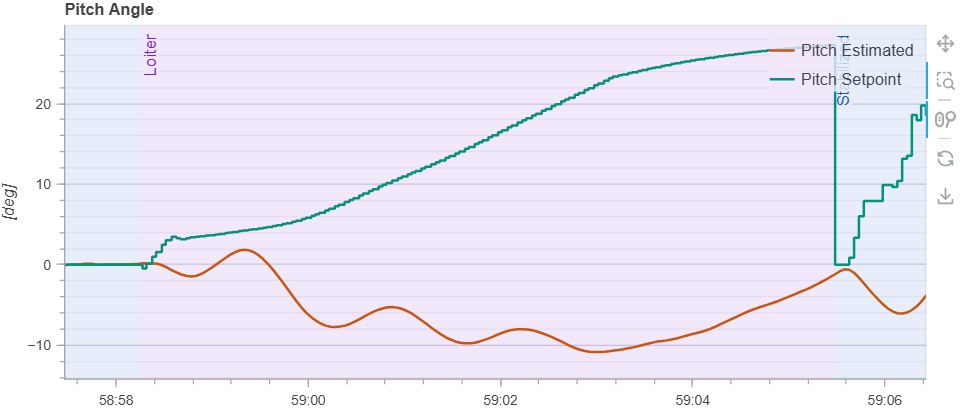
Issue summary: When switching the fixed-wing to Loiter (Hold) mode, the aircraft pitched down very aggressively and lost a lot of altitude. The throttle briefly dropped (almost like it cut the motor) and then slowly increased again, which made the situation look unsafe and nearly caused the aircraft to crash. Interestingly, when the RC link was lost and the aircraft entered RTL, it performed very well and maintained altitude without any issues. We would like to understand why Loiter/Hold mode produces this strong pitch-down and altitude loss, while RTL works fine, and what parameters (e.g. TECS, throttle, airspeed, L1, or loiter radius) should be tuned to solve this problem. Log attached for review.
https://review.px4.io/plot_app?log=fc1718e9-fbe0-44eb-b3b2-9a77c8b21ce7
I was encountered with similar problem is your LNDFW_ROT_MAX is 0.5 ?
I checked my parameters, but LNDFW_ROT_MAX is not set to 0.5. It doesn’t appear in my modified parameters list, so it should be at the default value. Can you tell me what value you recommend for this parameter to avoid the aggressive pitch-down in Loiter?
I also noticed that when switching to Loiter, the aircraft makes an excessive roll angle and then loses altitude. How can I limit or tune this so the aircraft doesn’t lose so much altitude during Loiter?
At the time of the flight there was also some payload/weight on one wing. Could this asymmetry have contributed to the aggressive roll and altitude loss? If so, what can I do to mitigate the problem? During missions we sometimes drop payloads, and occasionally only one side is released while the other remains, creating an imbalance. How can I tune or configure the system so that this asymmetry does not cause dangerous behavior during flight?
When I try to auto takeoff if before arming plane was already in flying state after launch agressive pitching down movement going on. So I had to keep plane perfectly stationary before arming. After the flight I examined the source code fixedwing land dedector and this parameter was the problem. Due to its default 0.5 value plane always think flying. Due to flying state something other triggering (There was another topic if I can find I will share it). To sum up when I increased this 0.5 value about 5-7 degree plane not switching to flying state.
But I checked 1.15.4 and this parameter condition is already removed. But behavior is similar so I think you should check this.
You can try this on ground. Remove the propeller. Connect QGround and look vehicle state left top corner if your vehicle switching to flying state immediatley even with very small movements this can be problem.