Hi all,
I have set the range finder to be used for altitude estimation in conditional mode (h<10m and v<2m/s).
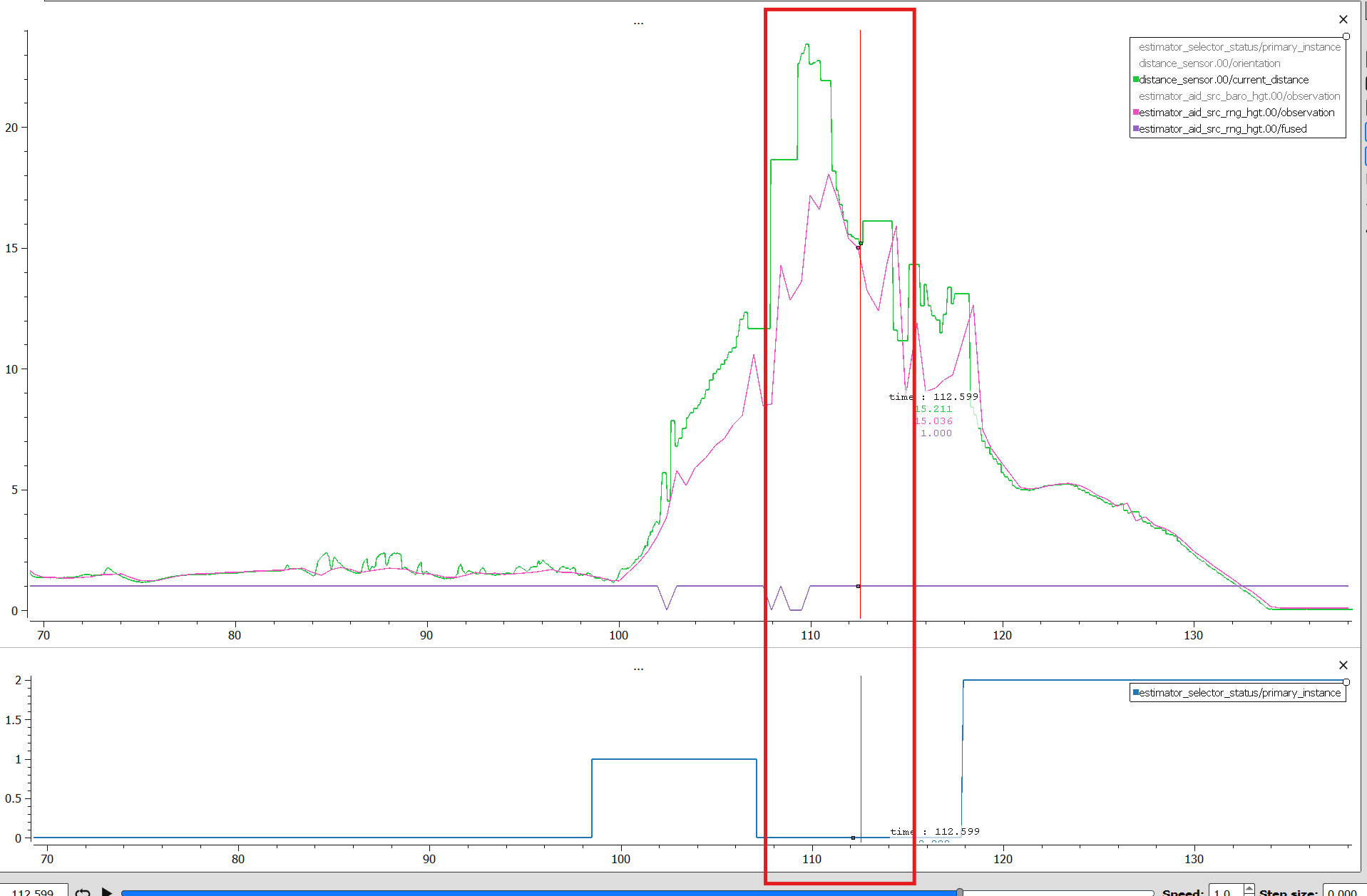
I see from a log that even when the altitude recorded is greater than 10m, the range finder data is still fused by the EKF2 estimator and I would expect it not to be. In the below picture, I am showing the data retrieved by the range finder, the height estimated by instance 0 of the EKF2 and if the data is being fused or not. The graph below shows the primary EKF instance used - I am looking at the red box where the primary instance is EKF2.0, the range finder record an altitude greater than10m and the estimated altitude based on range finder is more than 10m. This is fused anyway and I do not understand why.
can anyone please help? Thanks a lot,
Nick
This is the log: https://logs.px4.io/plot_app?log=9a4c4643-6c01-4407-9757-214ed756dfa0