Hi,
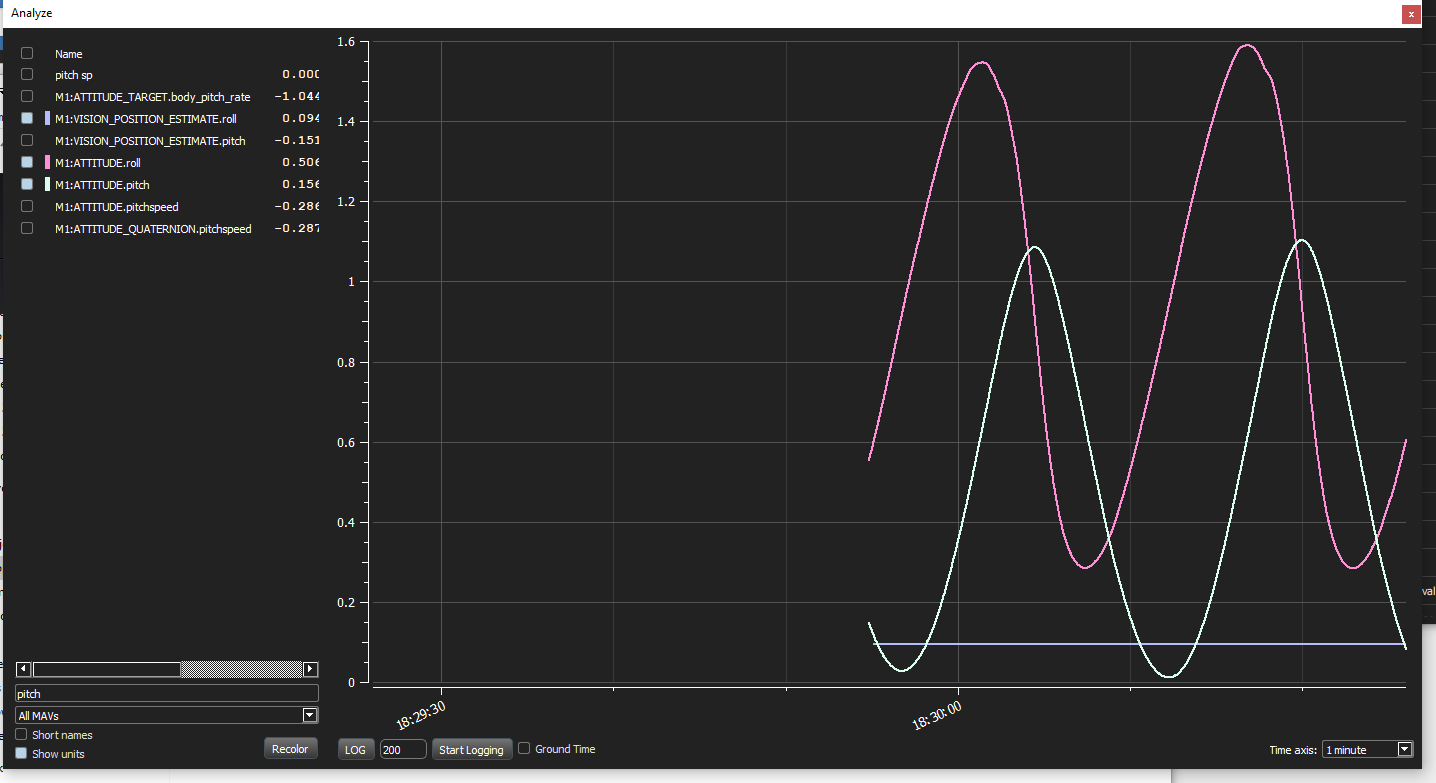
I have a positioning system on board and a companion computer. When I power the drone, the PX4 is slightly faster to boot than the positioning system and the companion computer. Consequently, when the EKF2 initializes, it does not have external position estimate for a few seconds. Every time, the attitude constantly drifts at about 0.5 rad/s. I have to reboot the Pixhawk (and only the Pixhawk) for the EKF2 filter to correctly initialize.
It looks like an internal integral constant does not get correctly initialize without external position estimate, and its value is so high that the system is unstable. Could I increase the convergence rate of the attitude? Is there another parameter that could change this behaviour?
Sincerely,