Hey,
We are currently trying to fuse the outer vision estimation and the EKF2 with imu data. We are using mavros as a connection to px4 pixracer and have logs of the mavros topics.
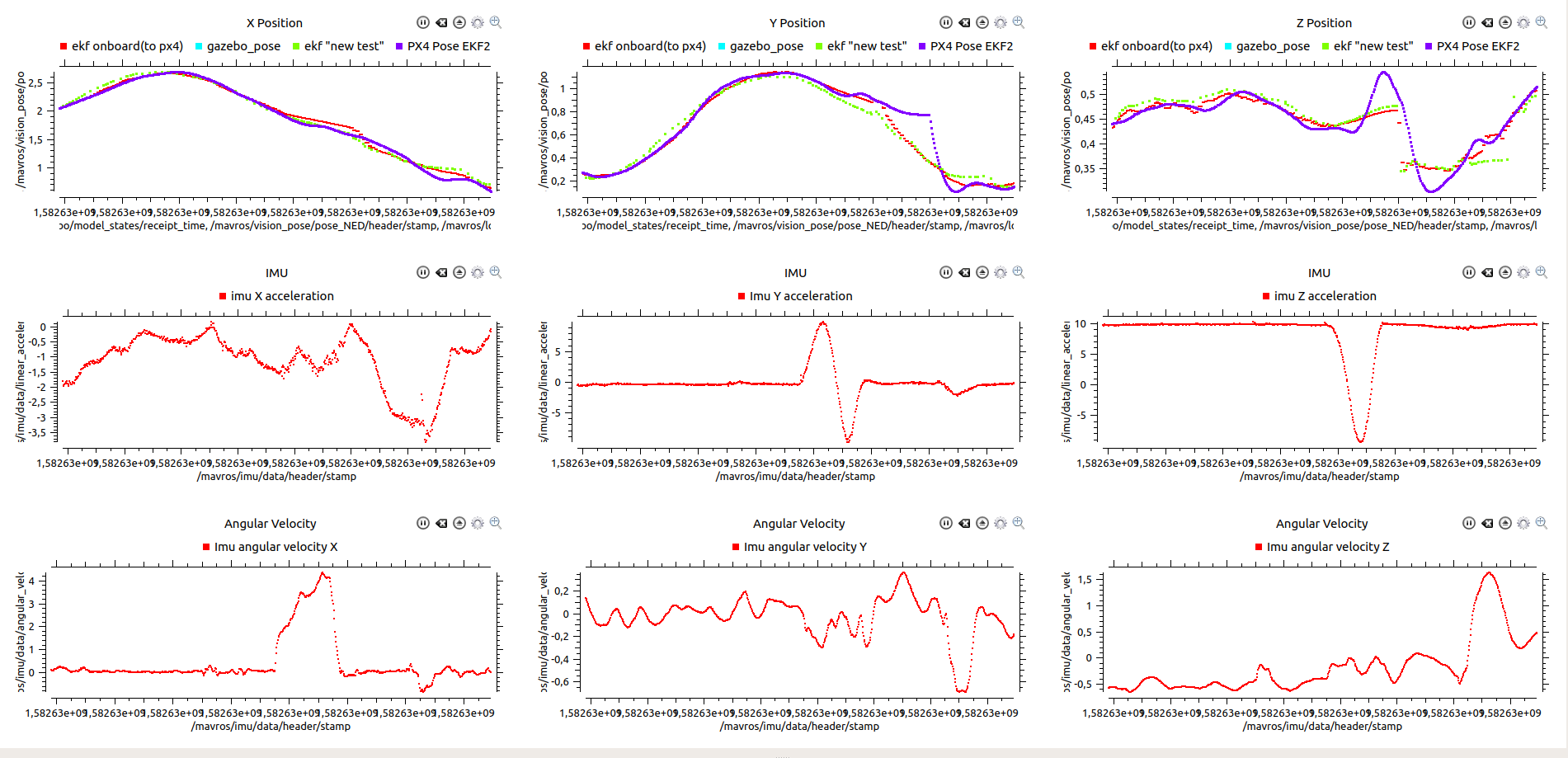
In the picture on the bottom, you can see our topics over time. we have 3 different topics.
The vision estimation of our EKF(Red). The px4 position output of EKF2 ( purple ). And a potentially better, Next version of our EKF(Green does NOTHING).
In the next line, the IMU acceleration can be seen and in the 3rd the angular velocity of the Gyro.
Our problem is that the Y Position is not following our estimate, which is more accurate than the px4 pose. This can be seen in the right half of the Y Position plot.
The reason the IMU Data changes is that our robot is rotating around the X-axis(which can be seen in the angular velocity plot and the g in the IMU data).
The Tuning of the EKF2 over Q Ground control did not help. We are not sure what we can do to reduce the “rejection” ob the EKF2 from our vision pose.
Is it possible to tune the EKF2 offline with IMU data, which was recorded earlyer? Or are the any other ways we can deal with that?
Thanks for your help.