Hi there!
I would like my EKF2 to converge a bit more on the barometer, and use less on the vertical velocity coming from the GPS.
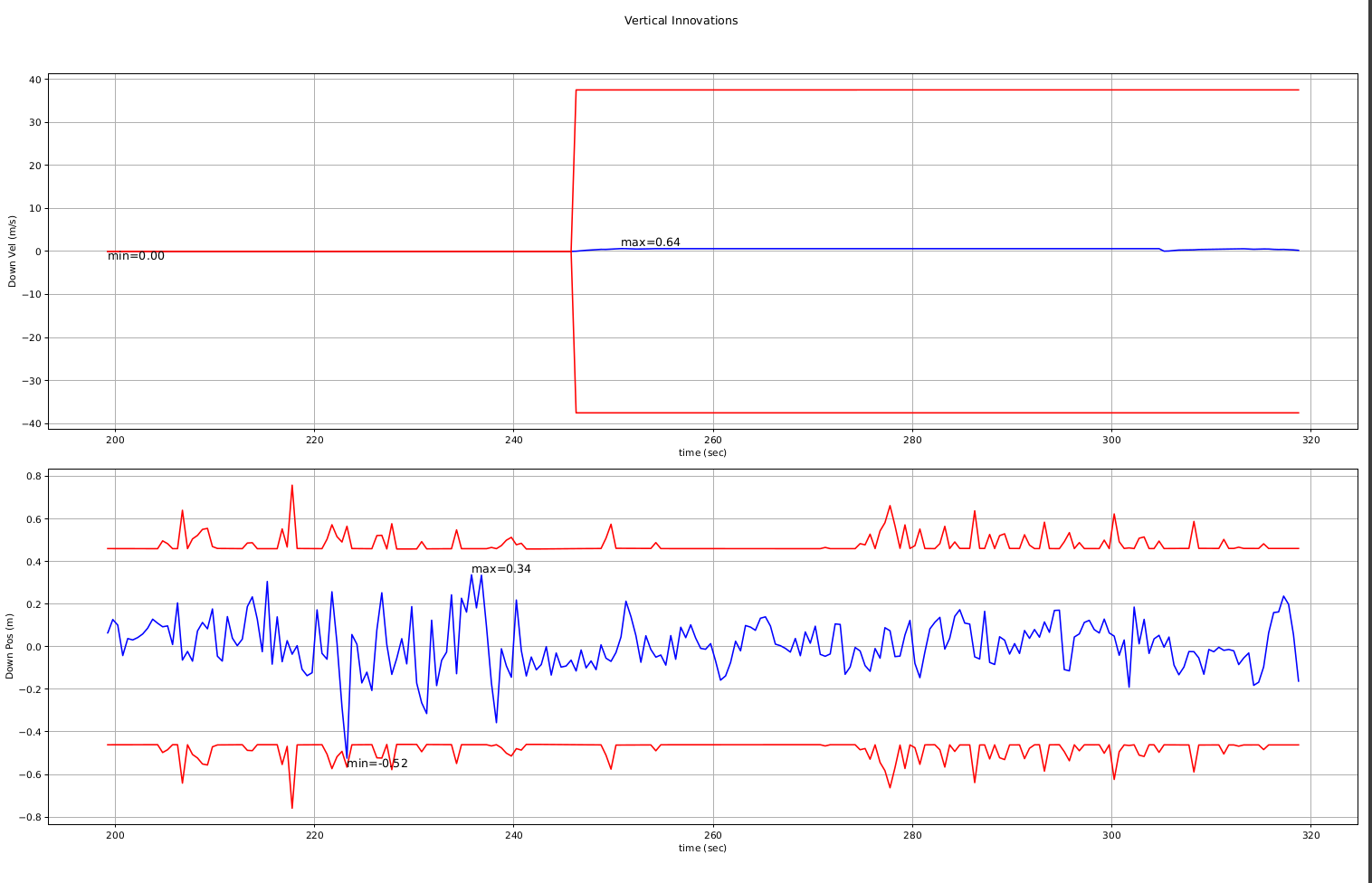
Looking at the EKF report, I get the attached plot.
I tried to tweak the EKF2_GPS_V_NOISE, as well as EKF2_ACC_NOISE but it doesn’t seem to change anything to the vertical velocity covariance.
Any help is appreciated.
Thanks!