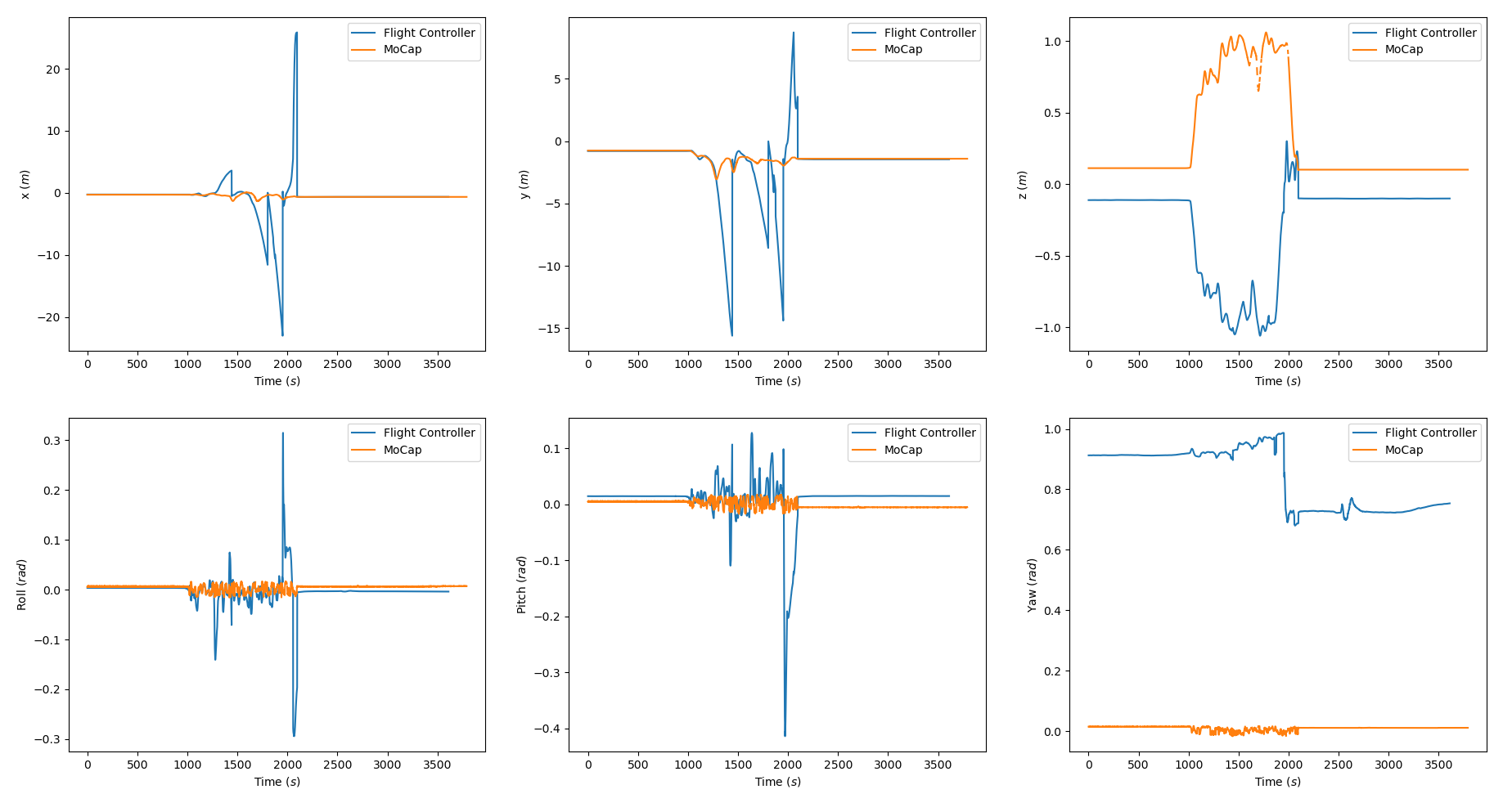
I am testing position hold for the drone indoors using mocap. I am sending mocap data through mavros and I plotted a graph from the raw mocap data being generated and the local position of the drone (/mavros/local_position/pose) can someone check the graph and tell me what I am missing, as soon as switched to position, the drone starts drifting, and also the yaw value is off by 0.99 rad (approx 57 degree)
Hardware: CubePilot Orange
Firmware: 1.13.3