Hello everybody,
I build my own quadcopter based on F450 frame and Pixhawk V2 kit like the one below :
Robokits India, Easy to use, Versatile Robotics & DIY kits
In QGC I select the F450 frame and I performed a couple of convincing flight in outdoor.
You can see below an extract of the PID controller (angular and angular rate in this case) with default parameters :
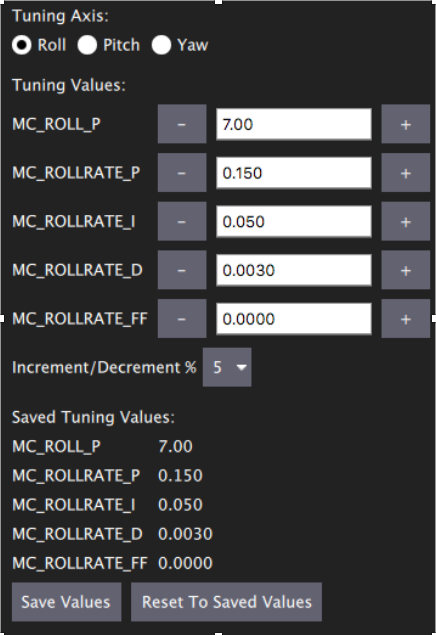
My question is : Do these parameters present by default in the PX4 controller is optimized ? If yes by which methodology ?
Thank you,
Jeremy