Hi everyone,
I’m currently working on porting the px4_raspberrypi_default firmware to a Rockchip RK3588 board. I successfully cross-compiled the code using my own toolchain without any errors.
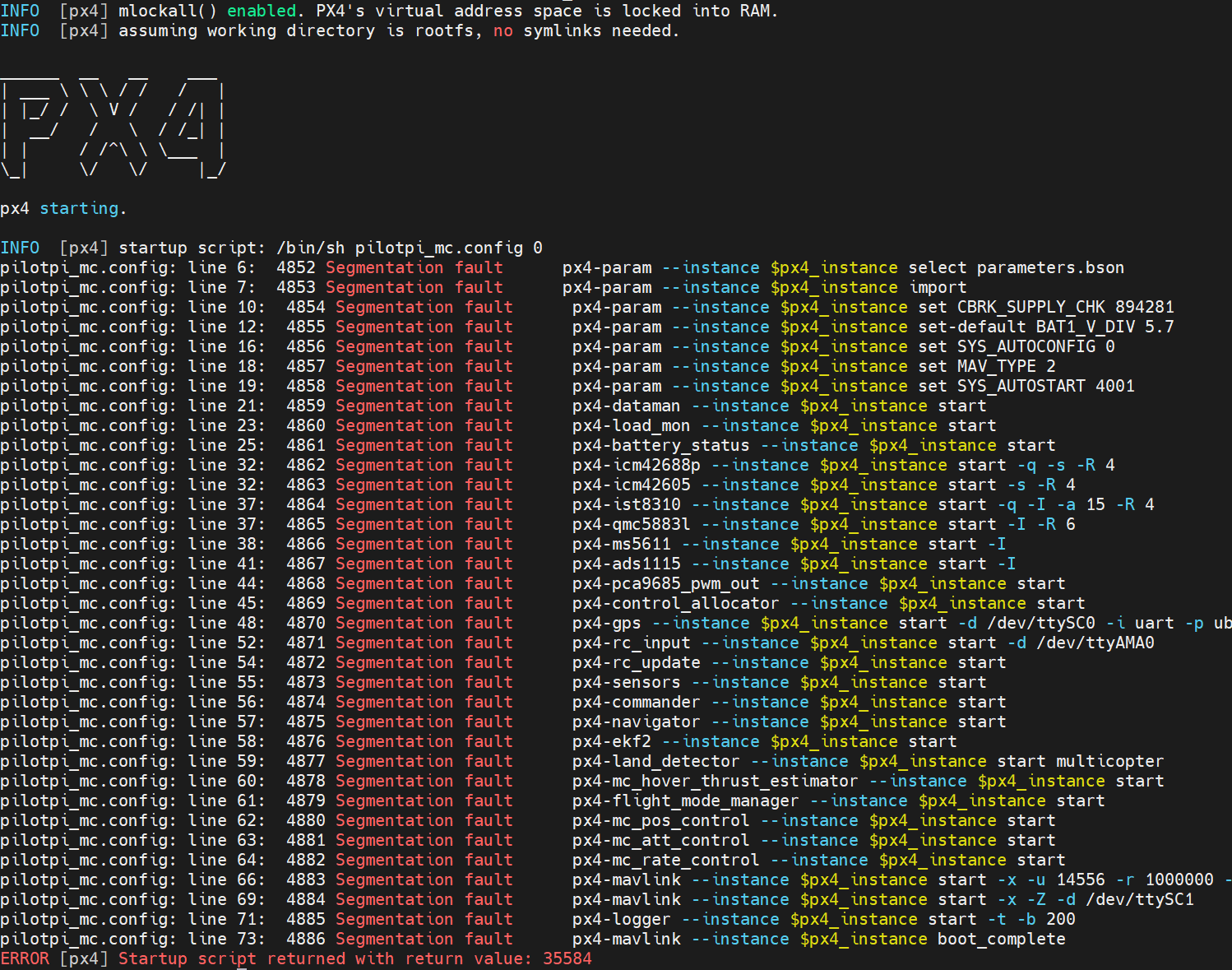
However, when trying to run the generated binary on the RK3588 board, I encountered a segmentation fault , as shown in the screenshot below:
This may suggests that there be some hardware-specific or platform-related configuration issues that need to be addressed for the code to run properly on the RK3588 platform. Although I’m using a buildroot system instead of a normal Ubuntu one, it seems that the same thing happens when others try to port the code to another non-RPi platform.(see Running PX4 on zynq ultrascale+ - PX4 Autopilot - Discussion Forum for PX4, Pixhawk, QGroundControl, MAVSDK, MAVLink)
I’m not sure where to start debugging this issue. Has anyone experienced similar problems when porting PX4 to non-RPi platforms? Or could you suggest ways to approach this segmentation fault — for example, how to trace the root cause or what kind of adjustments might be needed in the PX4 source code?
Any help or guidance would be greatly appreciated!