We have modified quad copter into octa copter. In position hold mode we injected the motor failure. The thrust set point reduced which is counter intuitive.
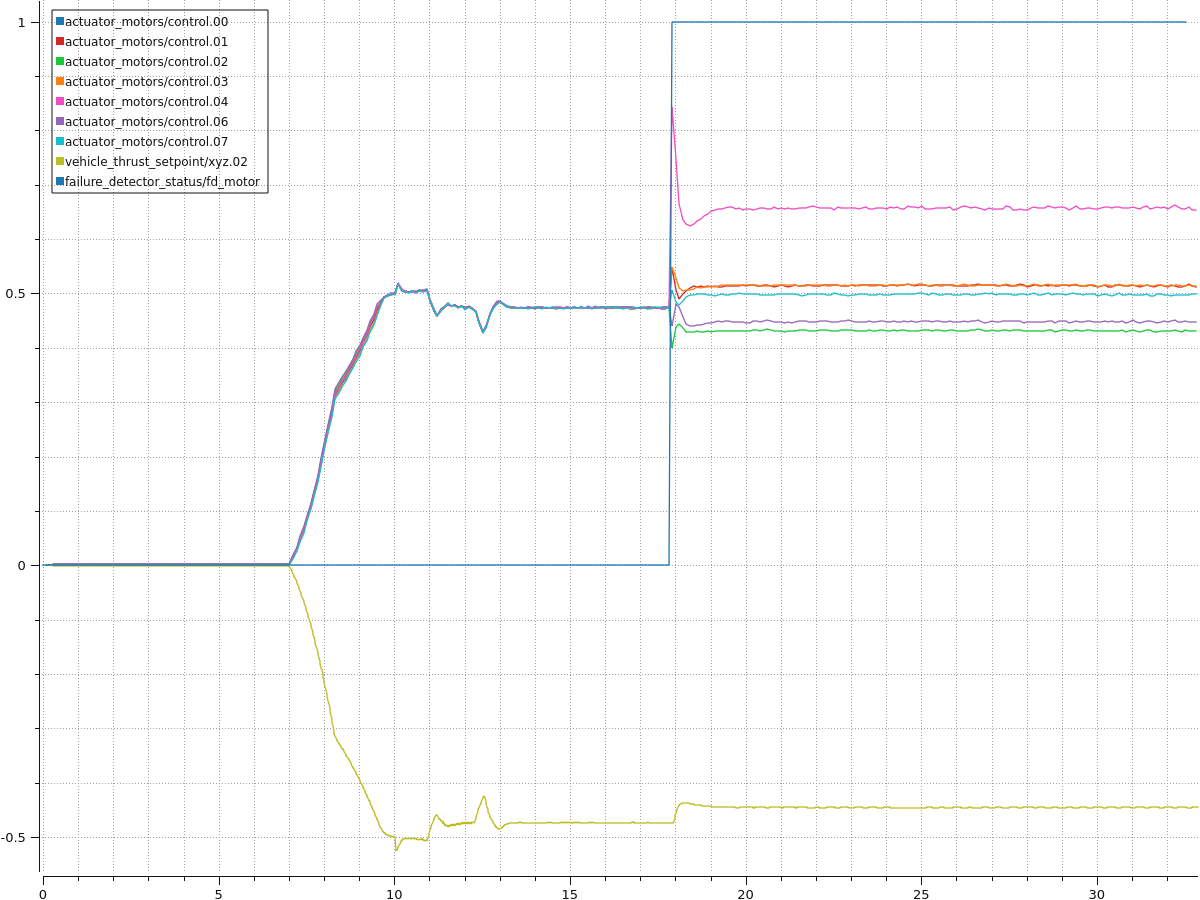
So please anyone could clear our doubt regarding the change in thrust_sp.
We have modified quad copter into octa copter. In position hold mode we injected the motor failure. The thrust set point reduced which is counter intuitive.
So please anyone could clear our doubt regarding the change in thrust_sp.
@sfuhrer Can you please help with this? Thank you in advance.
It’s not easy to see from your attached screenshot what you mean, can you attach a log file as well?
@sfuhrer here is the link : https://review.px4.io/plot_app?log=e5d99219-9a9b-4317-b108-689572f9af4a
The point I want to discuss is that as soon as I inject motor failure in sitl why there is a sudden change in thrust_sp.
@sfuhrer Any comments on this topic?