Hello,
I am currently trying to control the drone using Offboard mode for the indoor flight with PX4 master version. Since I have only a local position from VICON, I tried to set a global origin using ‘commander set_ekf_origin’ to have a global position. However, it didn’t work out as follows:
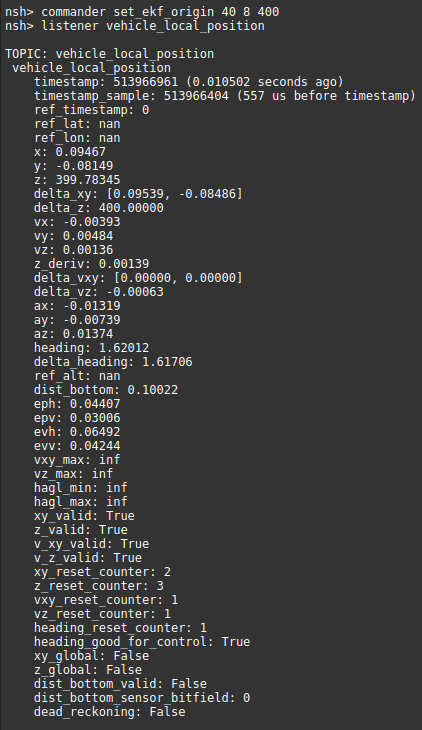
I expected the local_vehical_position to have ref_lat,lon, and alt values given as set_ekf_origin value, but instead, only the origin of local position z has been changed.
Furthermore, using mavros, I sent SET_GPS_GLOBAL_ORIGIN to the PX4 but it didn’t make any change just like the screenshot.