I’ve used the command “failure gyro wrong” and “failure gyro garbage” on console when running SITL with gazebo or jmavsim and I got these results:

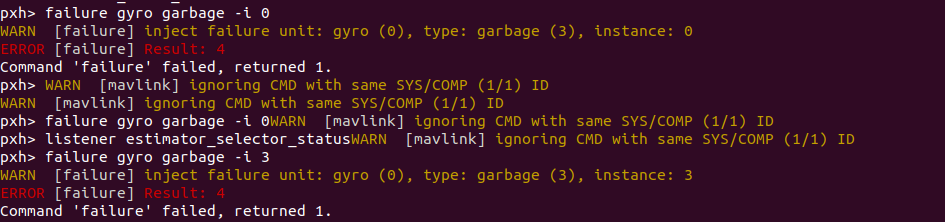
Does that ERROR followed by “failure failed, returned 1” mean that the command is not working?
When I use “failure gyro off” and “failure gyro stuck” the simulator stops and the PX4 instance stop too with pollout error from simulator communication.
How can I use this command “failure” properly and on which sensors does it work?
I’ve noticed that at barometers is working fine.