I’m interested in adjusting the ‘mc_pos_control’ module frequency from 50 Hz to 100 Hz. I’ve noticed that the ‘mc_pos_control’ module is added as the ‘nav_and_controllers’ work queue, but I’m unsure about where or how to modify its actual run frequency.
Could anyone guide me on where and how I can make this change to set the position controller’s frequency to 100Hz? Any insights or pointers would be greatly appreciated.
The MC position controller registers on the local position topic:
The local position seems to be published in the EKF2:
Which is triggered after each EKF update:
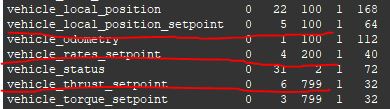
If I check uorb top on my bench setup, it tells me that vehicle_local_position is running at 100 Hz, so I would expect the position controller to work at that same rate . Can you verify that?
Thank you very much for your detailed guide, Julian.
Yes, I was able to check that Pos, att, and rate modules run at 100Hz, 200Hz, and 800Hz, respectively, using CUAV Nora with the latest px4 firmware.
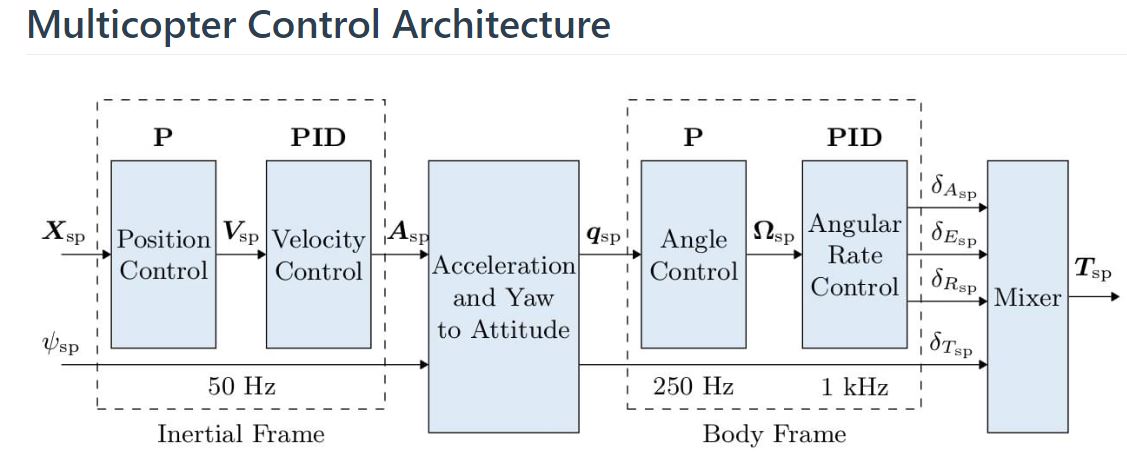
So I believe the controller diagram in the PX4 User Guide is inaccurate?