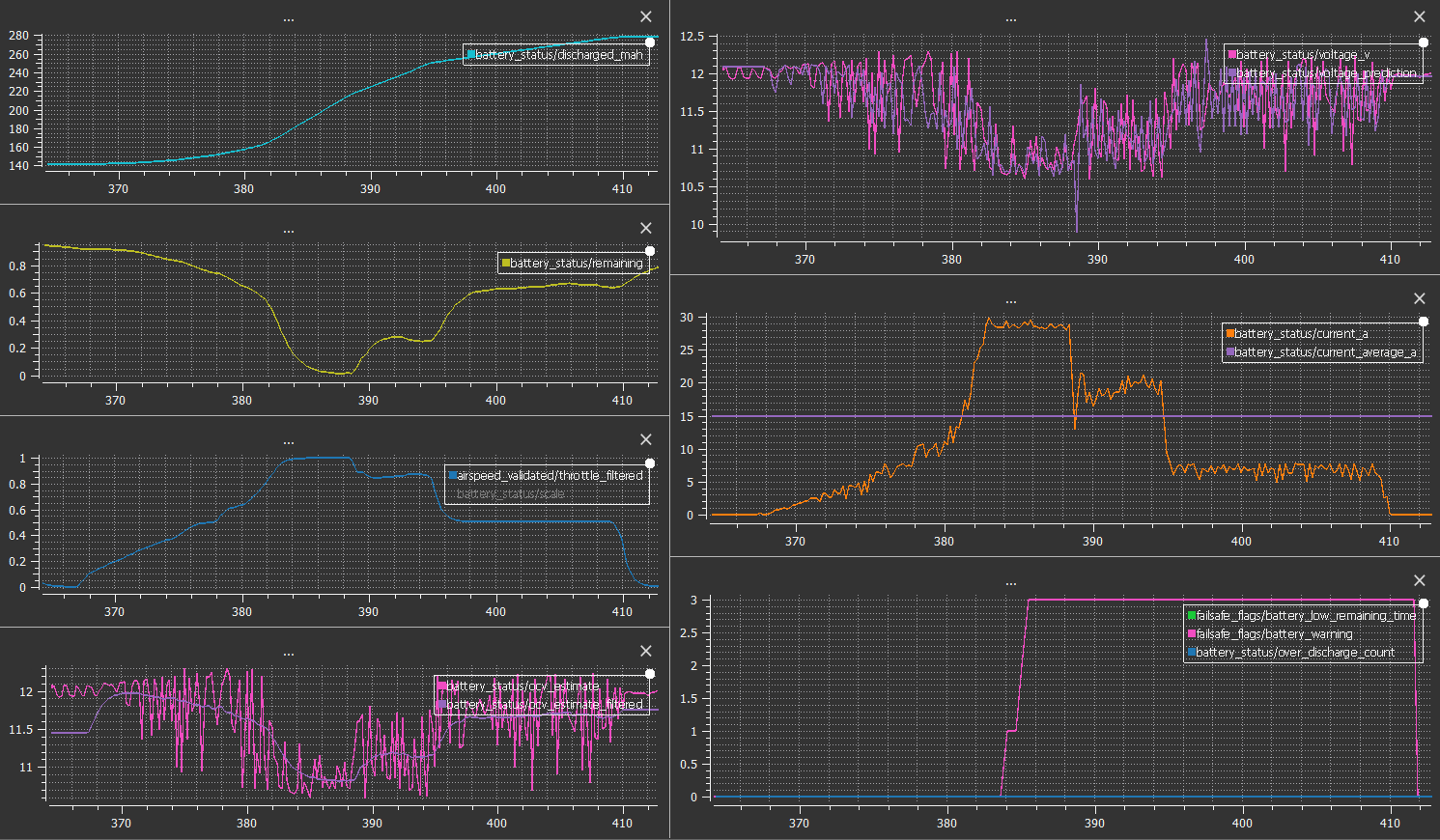
EDITED 6/11: Uploaded screenshot of log analysis.
I am having issues with battery estimation using the “load compensation” and “current integration” methods. I’ve followed the directions here ( Battery Estimation Tuning (Power Setup) | PX4 Guide (main) ) and tried both methods 2 and 3, for enabling basic load compensation based on the current measurement, as well as specifying battery capacity to try the Current Integration approach. In all my tests, the reported battery estimate drops from >90% to <10% within a few seconds of going full throttle. Actual voltage drop measures 12.0 to 11.6 V (4.0 to 3.87 V/cell) with throttle going 0 to 100%, so I would expect even a state estimate based purely on voltage would result in a higher percent remaining. After throttle is reduced, the battery estimate returns to a high value after a few seconds. It seems like the reported battery level ignores the state estimation, even though the estimated battery capacity used is low (tens of mAh).
My setup:
- Two 5200mAh, 3S, LiPo batteries in parallel, directly plugged into the power module.
- Pixhawk 6C
- Firmware: PX4 v1.17.0 stable
- PM02 V3.2 (Holybro)
- Herelink running QGroundControl version 4.4.2.1
- FWIW: flying wing (1 motor, 2 servos)
- I also tap into the battery power downstream of the PM02 to power my herelink air side and an FPV camera.
Relevant Parameters:
- BAT1A_PER_V: 36.367
- BAT1_N_CELLS: 3
- BAT1_V_CHARGED: 4.05
- BAT1_V_EMPTY: 3.6
- BAT1_CAPACITY: 9000
- BAT1_R_INTERNAL -1
Possibly relevant:
QGC gives me a warning of missing params: BAT1_V_LOAD_DROP, BAT2_V_LOAD_DROP. I don’t get this warning when connected to my PC via USB. Is it possible that this version of QGC does not support this method of battery state estimation?
…
What am I doing wrong?
Any help would be appreciated. Thanks!