For some reason, the barometer altitude estimate keeps dropping very sharply on our VTOL, which causes vehicle altitude estimate to drop as well.
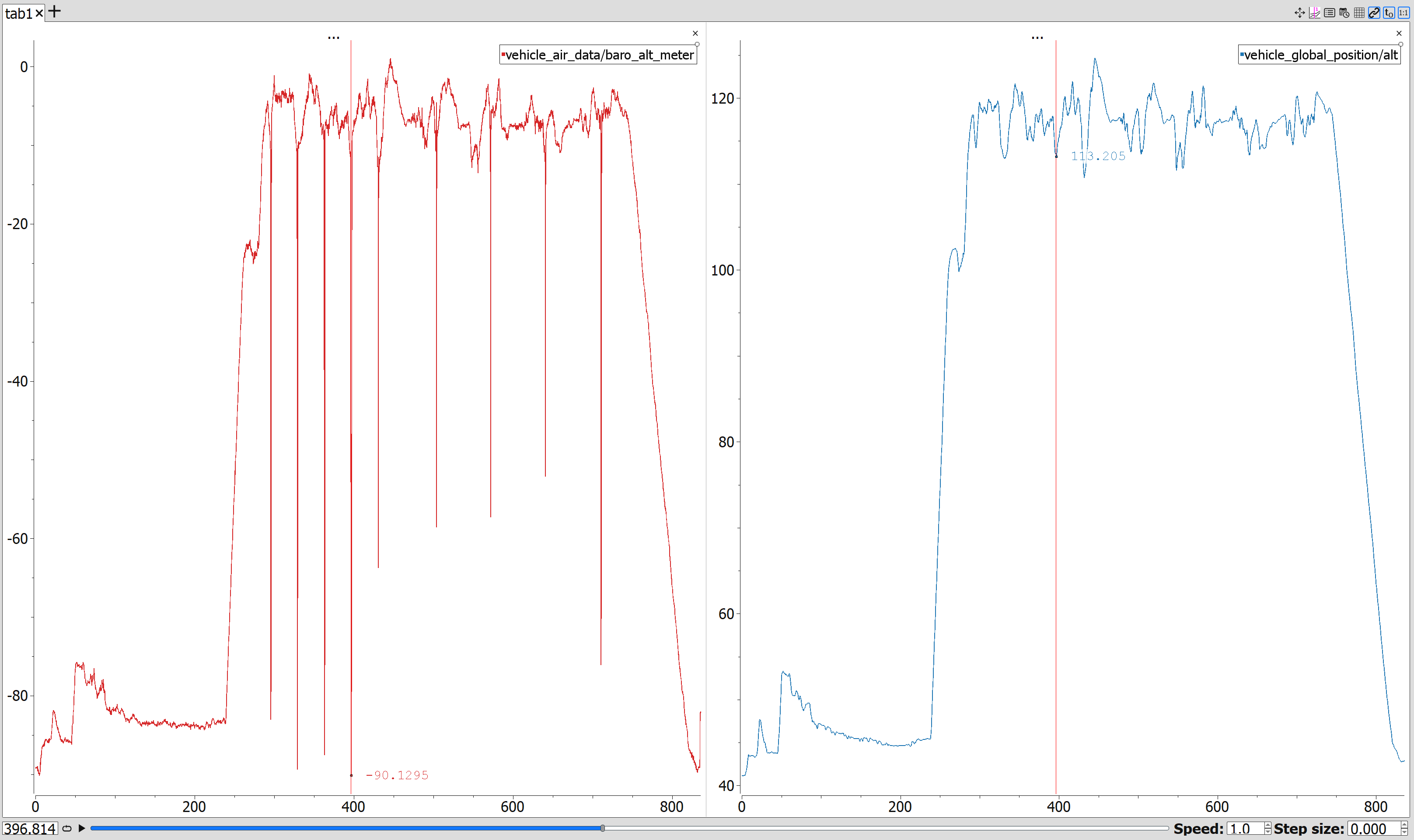
Here is the log: https://review.px4.io/plot_app?log=5df7e9c7-9590-4e56-baa2-052a6b2a734b
We are using PX4 v1.14, the ARK_FMU_V6X flight controller, and 2 ARK RTK GPS’s (for RTK GPS heading).
Mysteriously, the barometer altitude drops often coincide with when the heading value rolls over from negative to positive pi, or positive to negative pi.
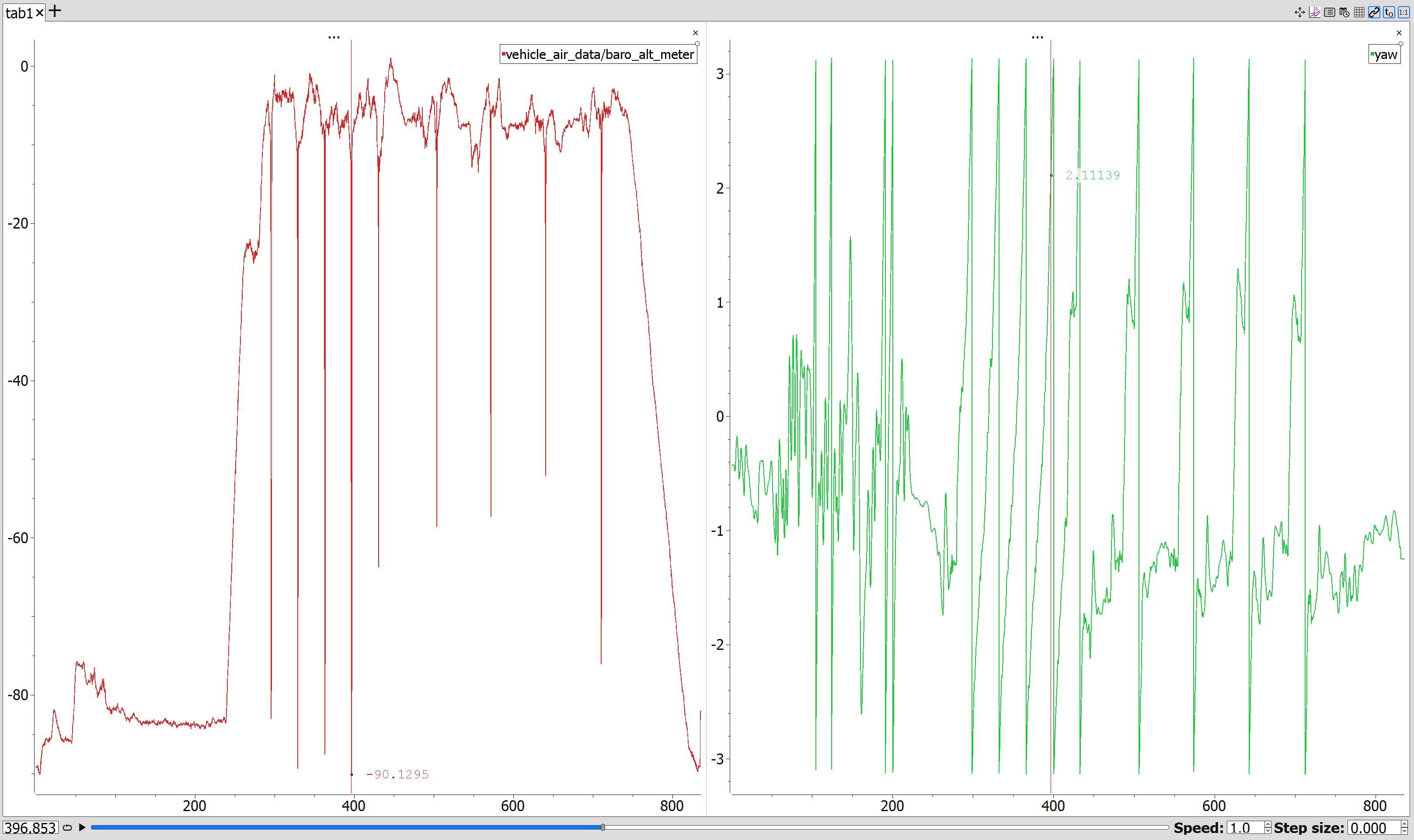
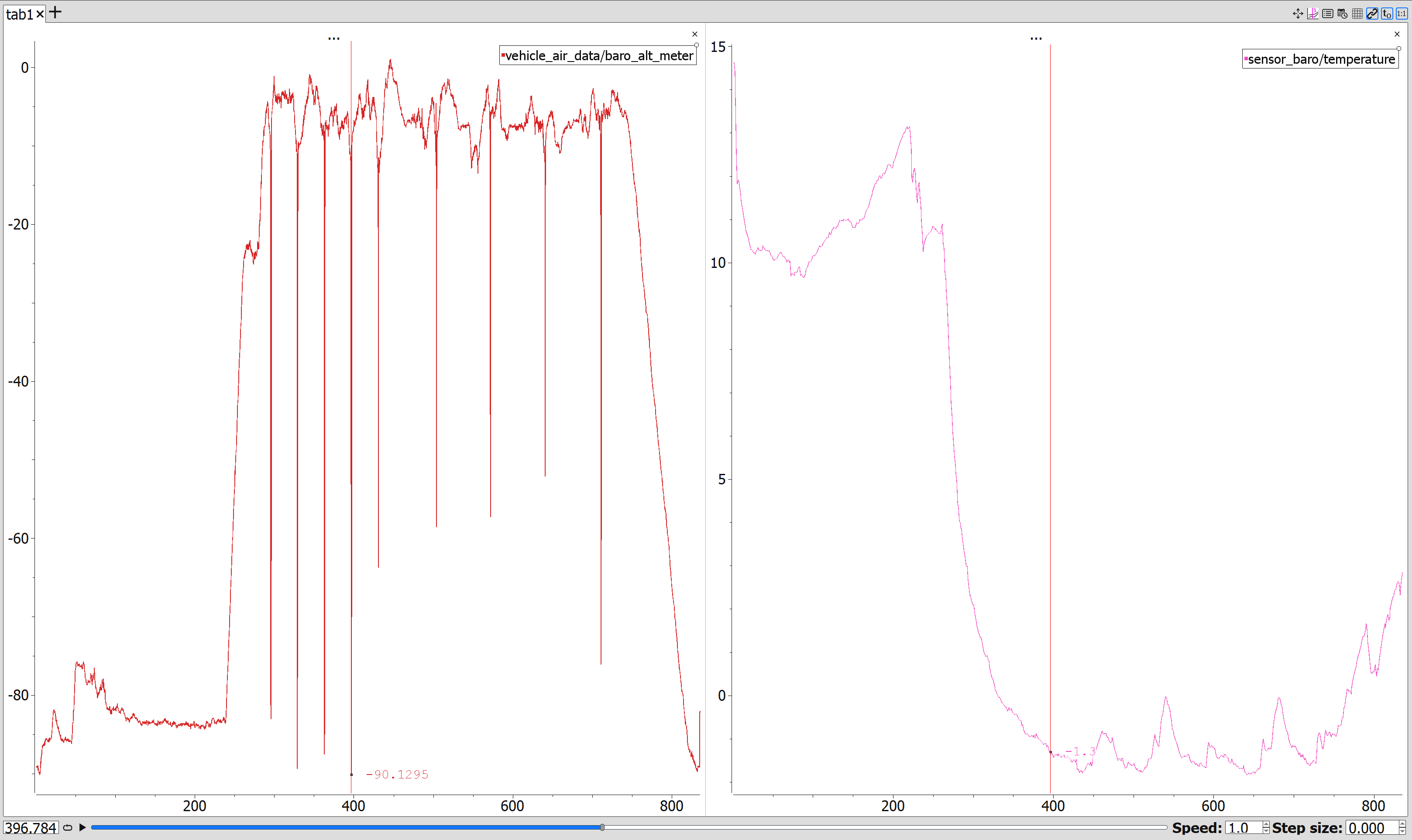
Looking at the code, that doesn’t really make sense to me because the barometer shouldn’t be considering heading at all. But the barometer pressure and temperature look fine, so I’m confused.

Any ideas what could be the issue?