Hey Guys
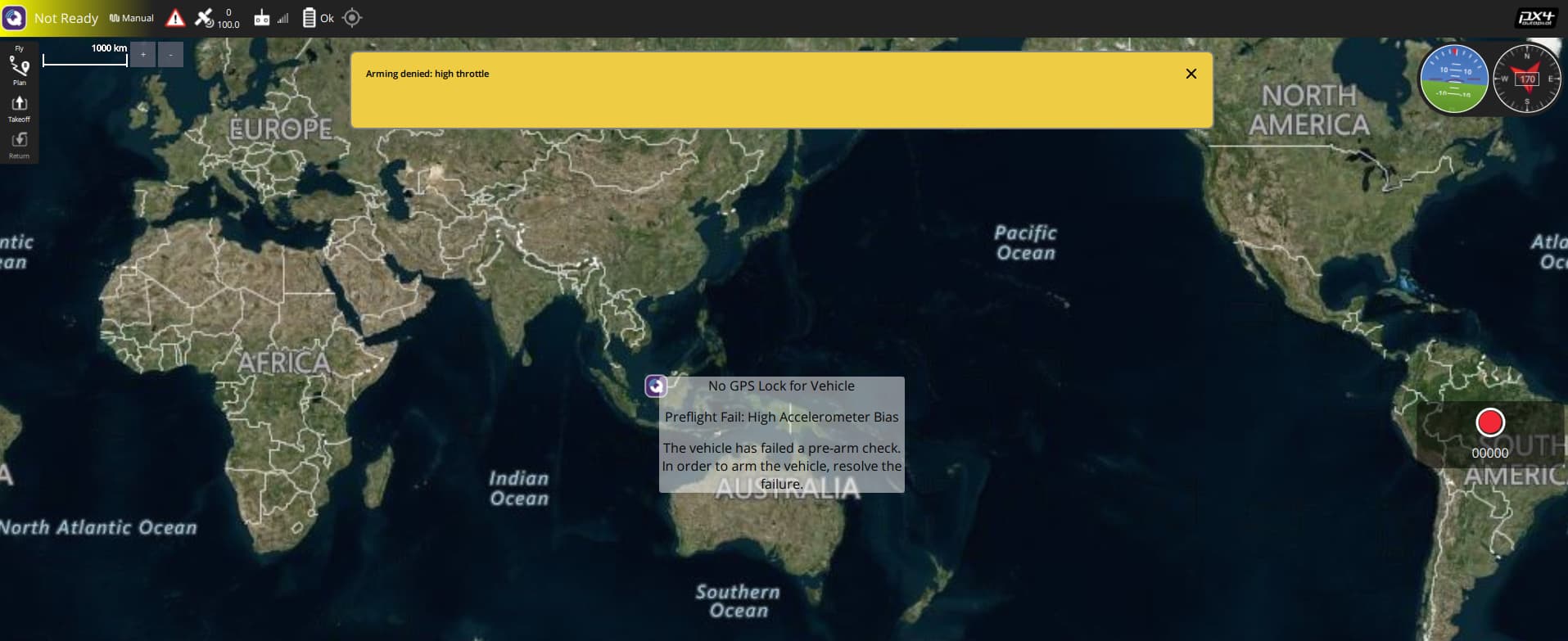
I am using the Holybro S500 Kit for my research with Pixhawk 6c flight controller, l did the initial configuration but when l want to arm the drone l have this message as shown in the pictures ? any suggestions how to fix it ?
Thanks in advance.
Hi,
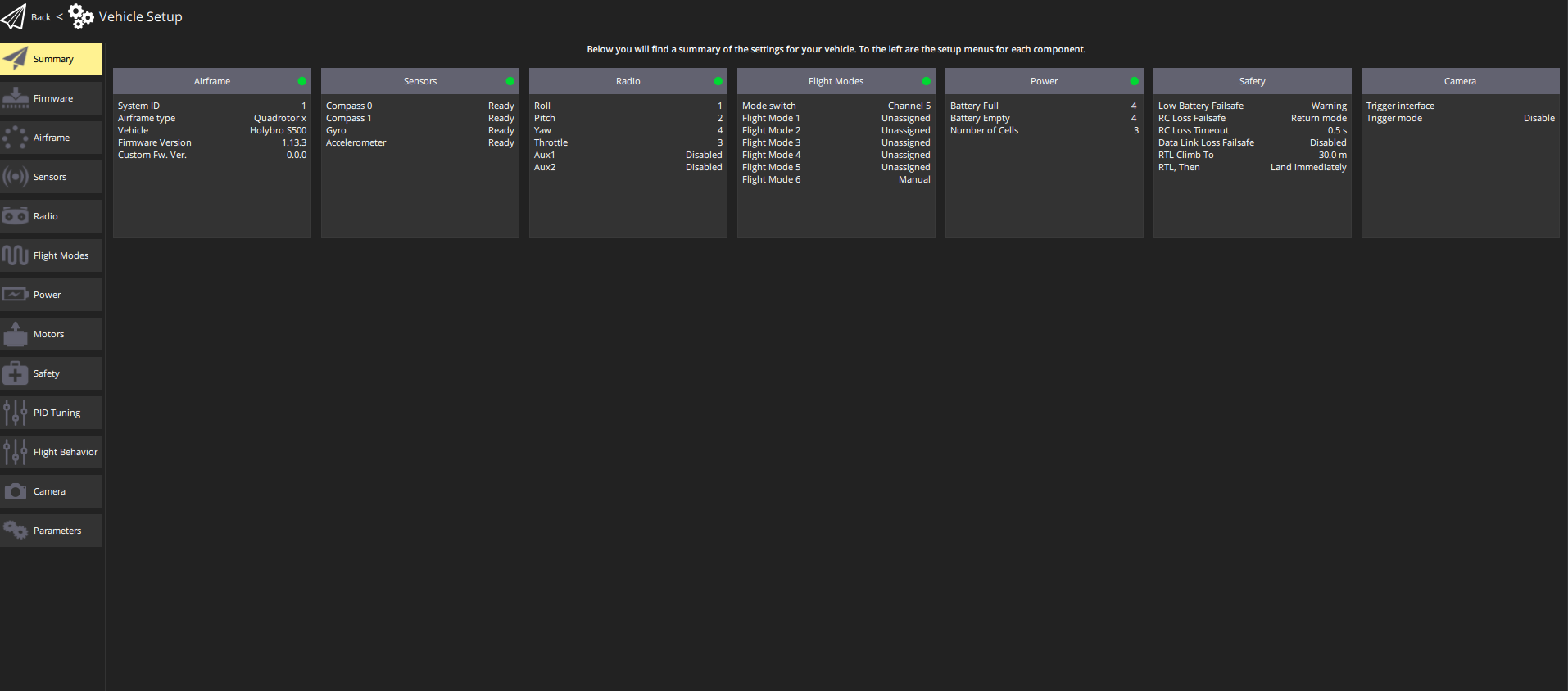
I can see that you have configured the RC,
To arm the quadcopter in Altitude or Manual mode,
You need to reduce the throttle force to the minimum (from the RC), and then you will be able to arm the quadcopter
l did it but still same problem 
Hi,
I advise you to follow this video : PixHawk/ArduCopter for Beginners (2023 series): 2. Installing the PixHawk 6C and full setup steps - YouTube
even if you are not using ArduPilot, it will help you to understand the arming process
Put the throttle to the lower position, and you solve this problem.
But, it would help if you were sure that you put on zero the throttle. You can be in Mode 1 or 3 (throttle on the left), and you can consider being in Mode 2 and 4 (throttle on the right). So, please check!
Or you are in the correct mode, but the throttle channel is reversed.
Or on your station or in PX4, you mapped in the wrong way the channels, and the throttle is yaw or pitch.