Hello guys, In offboard mode, I’m using topic /mavros/setpoint_raw/attitude, and set the type_mask = IGNORE_ATTITUDE (128), so that I can send [p, q, r, collective thrust] to mavros.
In QGC, I set MC_PITCHRATE_I, MC_PITCHRATE_D, MC_ROLLRATE_I, MC_ROLLRATE_D, MC_YAWRATE_I and MC_YAWRATE_D as 0, which is a simple rate p control.
However, when I send some bang-bang required body rate commands, the PWM of each 4 rotor is somehow get constrained?
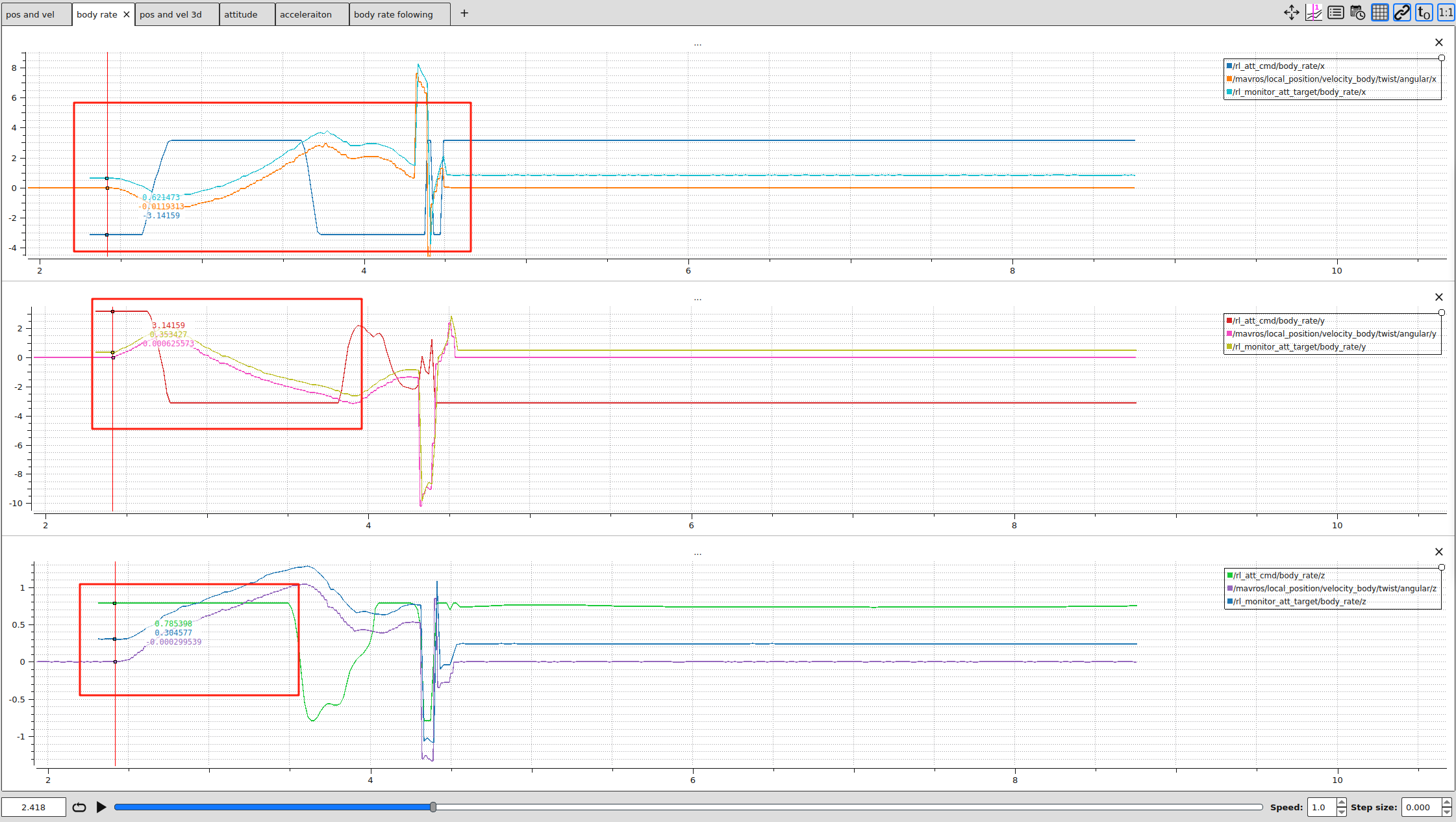
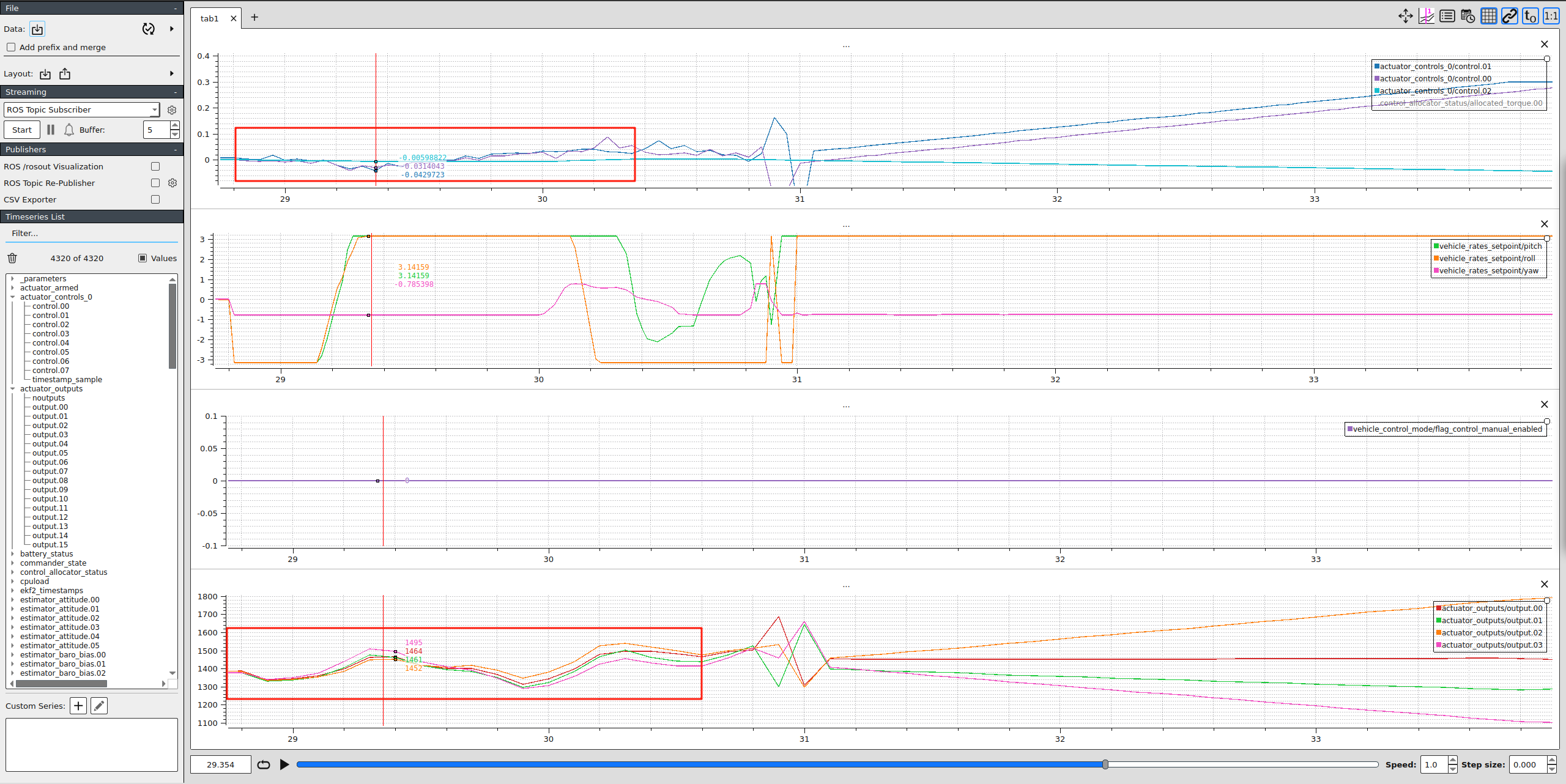
As you can see from 2 pics above, I’m sure the FCU got the vehicle_rates_setpoint, but the rotor PWM output is confusing.