Rasmus
September 11, 2023, 9:47am
1
Hi
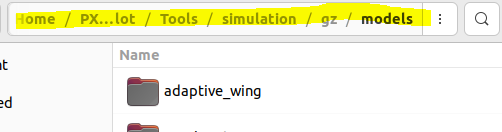
I have created a folder in /Tool/simulation/gz/models
I have copied the model from standard_vtol
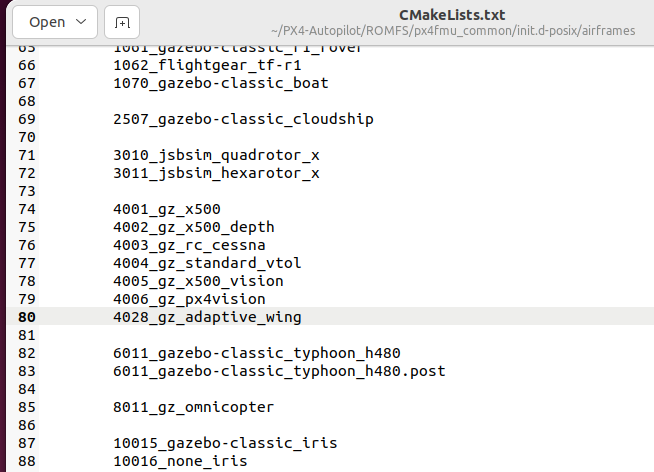
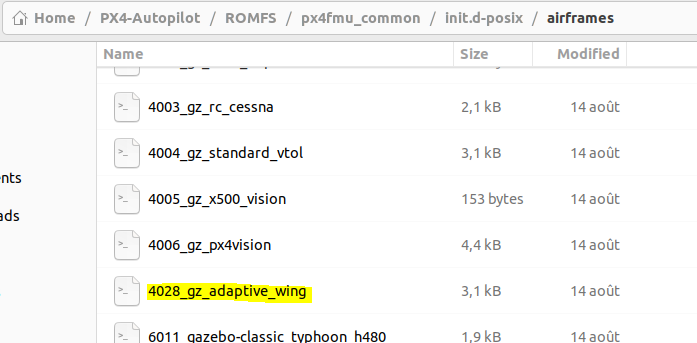
How do I get to make px4_sitl gz_test_model? in what file(s) should I add to make this model.
Thanks.
Do you have comment on this @Jaeyoung-Lim ? I think this would be a pretty frequently asked question, and I dont understand this part either yet
@junwoo0914 @Rasmus you can follow the instructions in the documentation: Gazebo Simulation | PX4 User Guide
1 Like
Rasmus
September 13, 2023, 8:49am
5
I made it work, somehow
1 Like
suezere
September 23, 2023, 1:08pm
6
Hi@Jaeyoung-Lim, I want to add a non-wing model to see its position (like a ball or a cylinder), can I get his local position this way? Is there a better way?