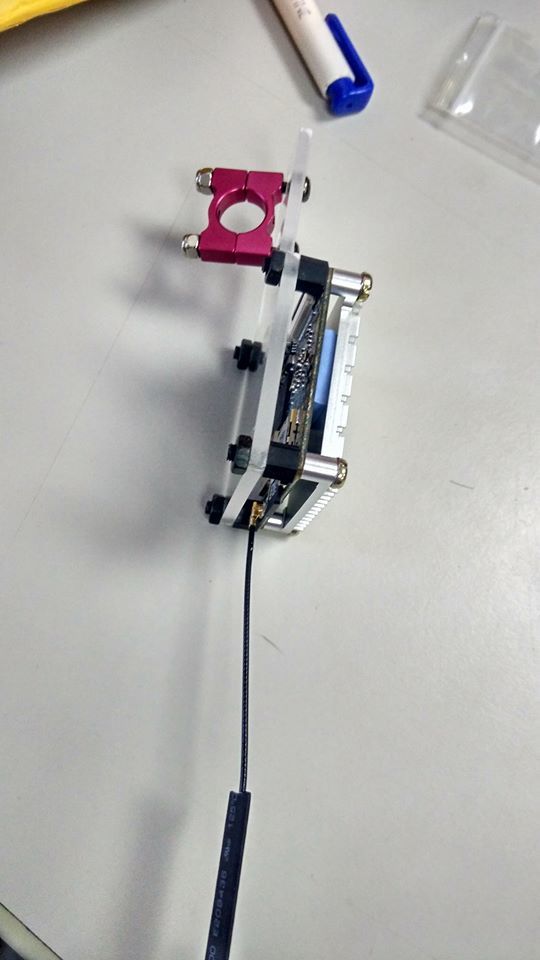
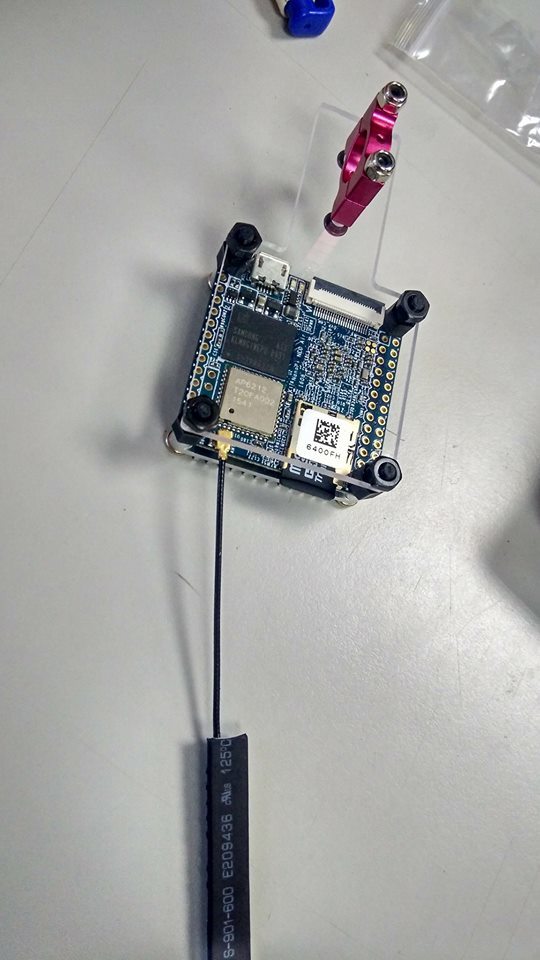
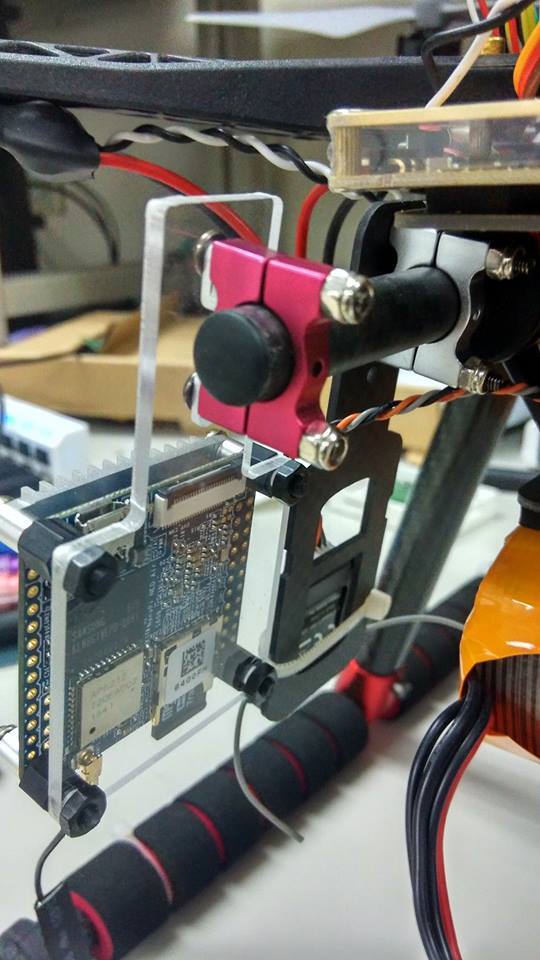
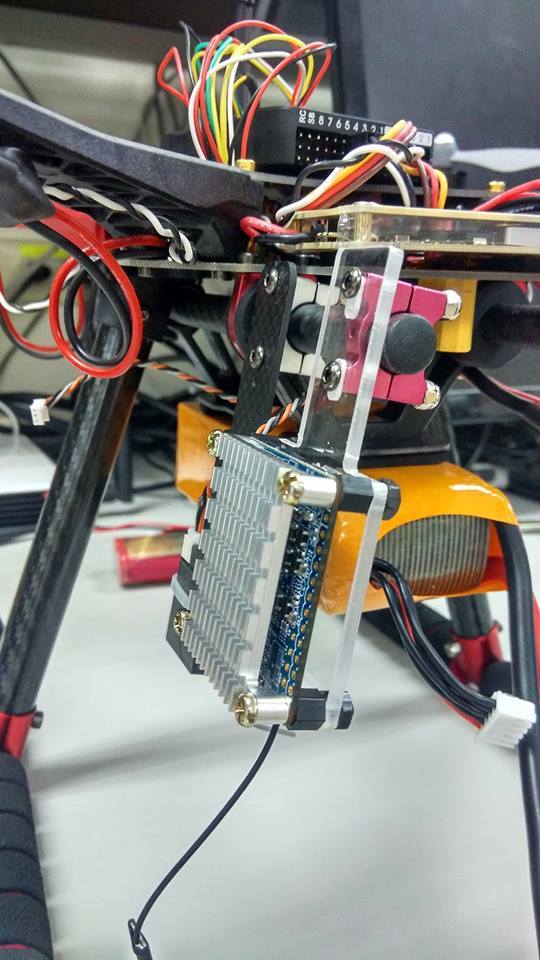
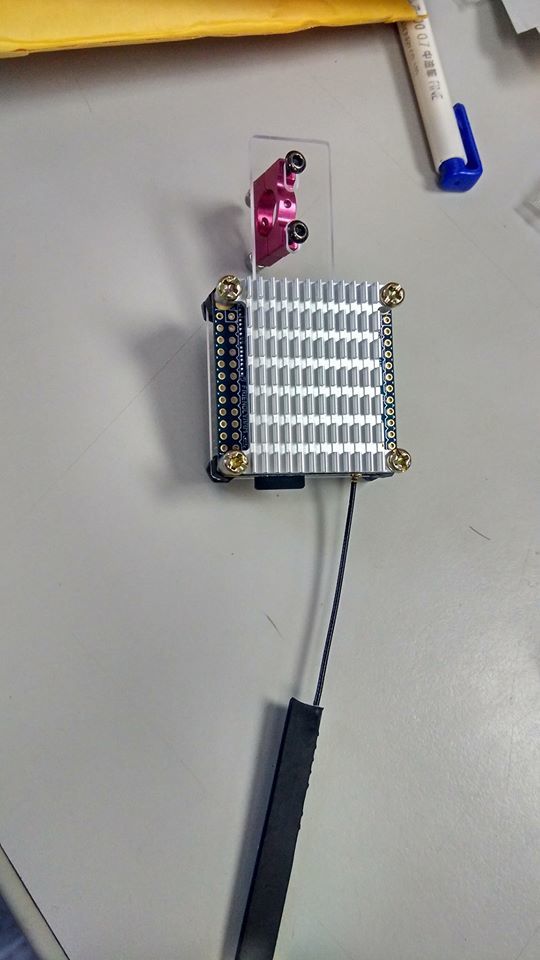
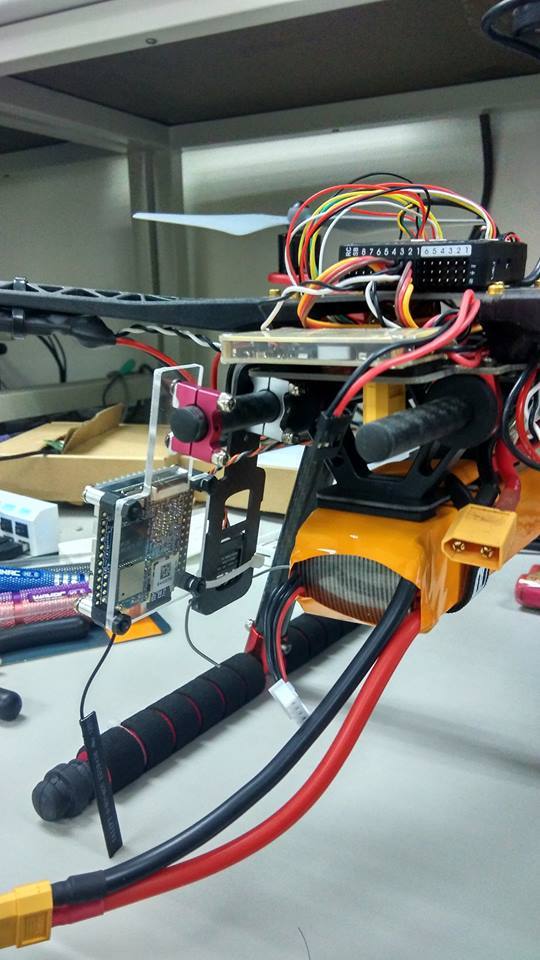
a small companion computers “nanopi neo air” on a drone.
Specifications
seth
November 4, 2016, 6:57pm
2
working on same setup - waiting for nanopi to arrive. is heatsink a requirement - my project is a tiny quad (90mm, with brushless). trying to save every gram.
software on nanopi neo air
os : armbian
build pixhawk firmware how to :
sudo apt-get install gcc-arm-none-eabi
git clone https://github.com/PX4/Firmware
run mavlink_shell how to :
sudo apt-get install python-pip
sudo pip install --upgrade pip
sudo usermod -a -G dialout $USER
update firmware how to :
./px_uploader.py --port /dev/ttyACM0 /home/build/px4/Firmware/build_px4fmu-v2_default/src/firmware/nuttx/px4fmu-v2_default.px4
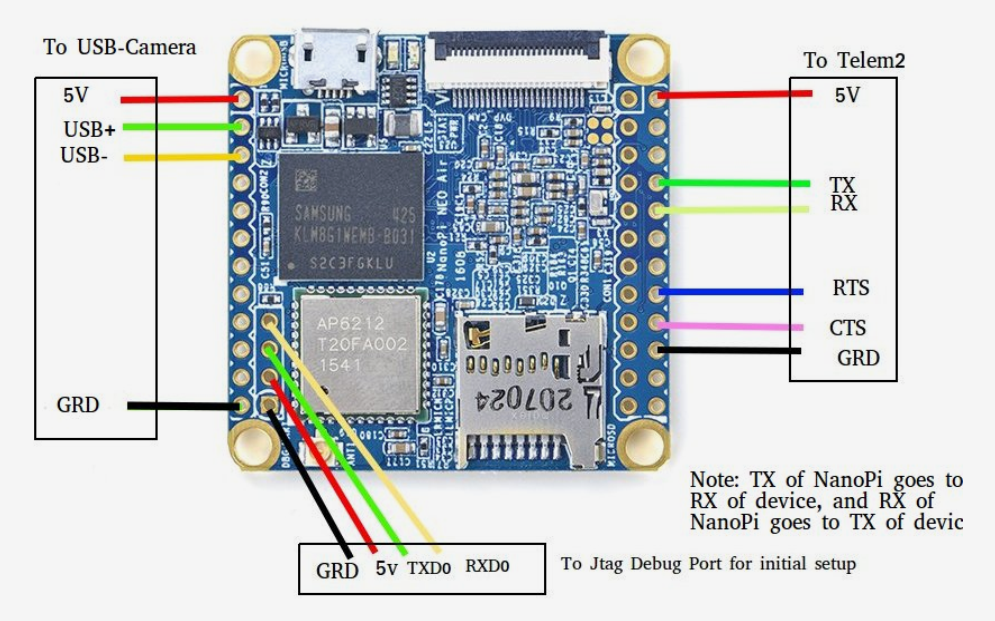
Great, I am working in the same project. Can you please post a diagram of connecting between the pixhawk and the Neo Air? Thank you.
Thanks for your post!
This is the connection,
after that, you canscreen /dev/ttyS1 57600
Hi! Im using a flight controller and NanoPi neo air as a companion computer. I booted raspbian os on the NanoPi and used putty terminal, and i cant seem to get an IP or wifi connection, am I doing something wrong? Is there a good documentation on this process? Thanks!